

 新火種
2023-11-13
新火種
2023-11-13 


意念操縱機器人成真!李飛飛團隊打造,做家務玩游戲樣樣能行
斯坦福李飛飛、吳佳俊帶隊讓《阿凡達》意念操控照進了現實!
現在,只需要動動腦子就能操縱機器人。
想吃壽喜鍋不用自己動手,切菜備菜、倒入食材,機器人一氣呵成:

做飯、烹茶樣樣都行:

忙完還能順便把桌面清理了:

你以為這就完了?這個機器人玩起游戲來也是一把好手:

甚至還能幫你熨衣服:

關鍵是,旁邊的操縱者只需要坐在那里“冥想”即可,無需手搖搖桿。

能做到這些,都要得益于研究團隊最新開發腦機接口系統——NOIR。
這是一個通用的智能系統,使用者無需佩戴侵入性設備,機器人可以從腦電信號中解碼人類意圖。
并且它還配有一個“技能庫”,可以隨意組合各種技能完成人類指令,輕松應對高達20項日常任務。
要知道,常規腦機接口系統一般只專注于一項或幾項任務。
目前這項研究已收錄于機器人頂會CoRL 2023:
圍觀網友一口一個哦買噶:

清華叉院助理教授許華哲也來評論區捧場:

這個NOIR系統究竟是什么?機器人為何能完成這么多任務?
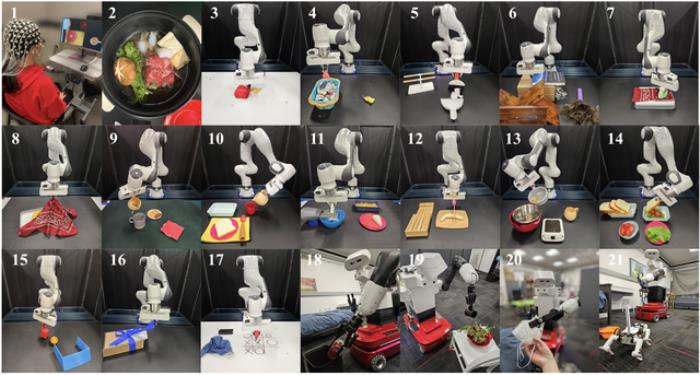
20項任務輕松拿下正如上文所說,這個機器人能干的事兒多著呢。
干酪撒粉這種任務也能輕松完成:

拆包裹、整理桌面這種活就更不在話下:


而其背后的這個NOIR系統,簡單來說可以分為兩部分:模塊化解碼管線、有原始技能庫的機器人系統。
主打一個讓機器人自動學習預測人類意圖。
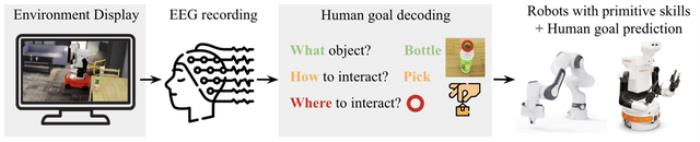
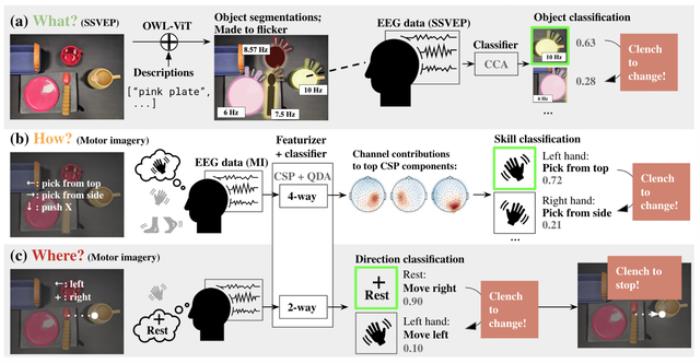
具體來說,模塊化管線將解碼人類意圖過程分為三個模塊:
1)選擇什么對象?
方法是在屏幕上顯示任務場景,利用對象的閃爍刺激產生SSVEP信號;每個對象以不同頻率閃爍,人類注視某對象時,腦電信號中該頻率成分增強。
然后用Canonical Correlation Analysis(CCA)方法,分析不同頻率的相關性,確定人類注視的對象。
2)如何交互?
這部分是通過提示人類想象執行某些技能(左手、右手等)產生運動意象信號,然后使用濾波和Common Spatial Pattern (CSP)算法預處理信號。
最后利用Quadratic Discriminant Analysis (QDA)進行4類識別,確定技能選擇。
3)在哪交互?
人類想象控制光標的左右運動來選擇技能執行的具體參數。同樣通過CSP和QDA處理并解碼腦電信號,判斷人類是左還是右。
研究人員還設置了安全機制,采用肌肉緊張信號來確認或拒絕腦電信號解碼結果,避免解碼錯誤導致的風險。
之后,機器人配備了一系列參數化的基本技能,例如Pick(x,y,z)、Place(x,y,z)、Push(x,y,z,d)。
可以組合使用這些技能來完成人類指定的各種任務。

在這個過程中,解碼人類意圖既費時又費錢。所以研究團隊選擇讓機器人用基于檢索的少樣本學習,來學習人類的對象、技能和參數選擇。
這樣一來,在給定一個新的任務時,機器人會在記憶中找到最相關的經驗,并選擇相應的技能和對象。
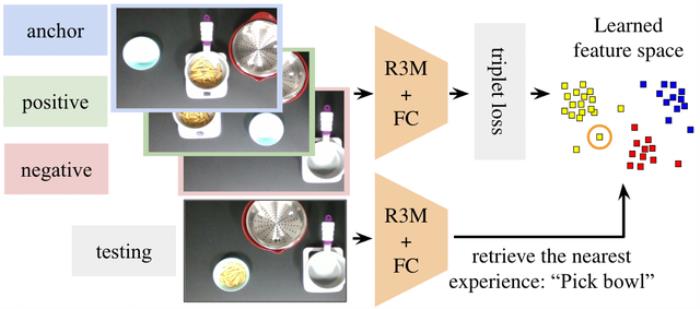
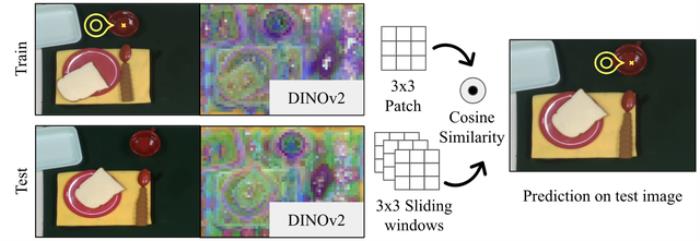
舉個例子,假設人類在執行抓取杯子的任務,選擇了在杯子的某個特定位置抓取(比如杯子的把手)。機器人會記錄下當時的圖像,以及人類選擇的抓取點。
在之后的任務中,當機器人看到新的杯子圖像時,它會首先根據預訓練模型來分析這個新圖像,提取圖像的語義特征。
然后計算新圖像的特征和之前記錄的訓練圖像特征之間的相似度,找出最相似的一個點,作為它預測的抓取位置。
通過這種匹配圖像特征的方式,機器人只需要人類示范一次參數選擇,就可以在未來自己預測參數,而不需要人類每次都完全重新選擇一遍。
使用NOIR系統,3名人類參與者完成了上面我們所介紹的20項日常活動任務,其中包括16個桌面操作任務和4個移動操作任務。
在測試中,每個任務平均需要嘗試1.8次就能成功,平均完成時間為20.3分鐘,這其中主要是人類決策和解碼耗時,占總耗時的80%。
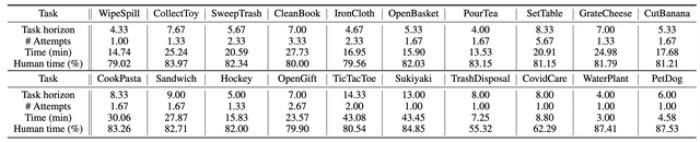
實驗各階段的解碼準確率和其它腦機接口研究差不多,但使用這種方法可以將對象和技能選擇時間降低60%,從45.7秒縮減到18.1秒。
 作者簡介
作者簡介除了李飛飛教授、吳佳俊教授帶隊,論文共同一作有四位,分別是:
Ruohan Zhang

Ruohan Zhang是斯坦福視覺與學習實驗室(SVL)博士后研究員,同時也是Wu Tsai Human Performance Alliance研究員。
主要研究方向為機器人技術、人機交互、腦機接口、認知科學和神經科學。
Sharon Lee

Sharon Lee是斯坦福大學視覺與學習實驗室(SVL)研究生研究員。
Minjune Hwang
Minjune Hwang是斯坦福大學計算機科學研究生,于加州大學伯克利分校獲得計算機科學和統計學本科學位,曾在亞馬遜、微軟和蘋果進行研究。
Ayano Hiranaka
斯坦福大學研究生,本科畢業于伊利諾伊大學香檳分校。
相關推薦




- 免責聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認可。 交易和投資涉及高風險,讀者在采取與本文內容相關的任何行動之前,請務必進行充分的盡職調查。最終的決策應該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產生的任何金錢損失負任何責任。
