

 新火種
2024-11-01
新火種
2024-11-01 

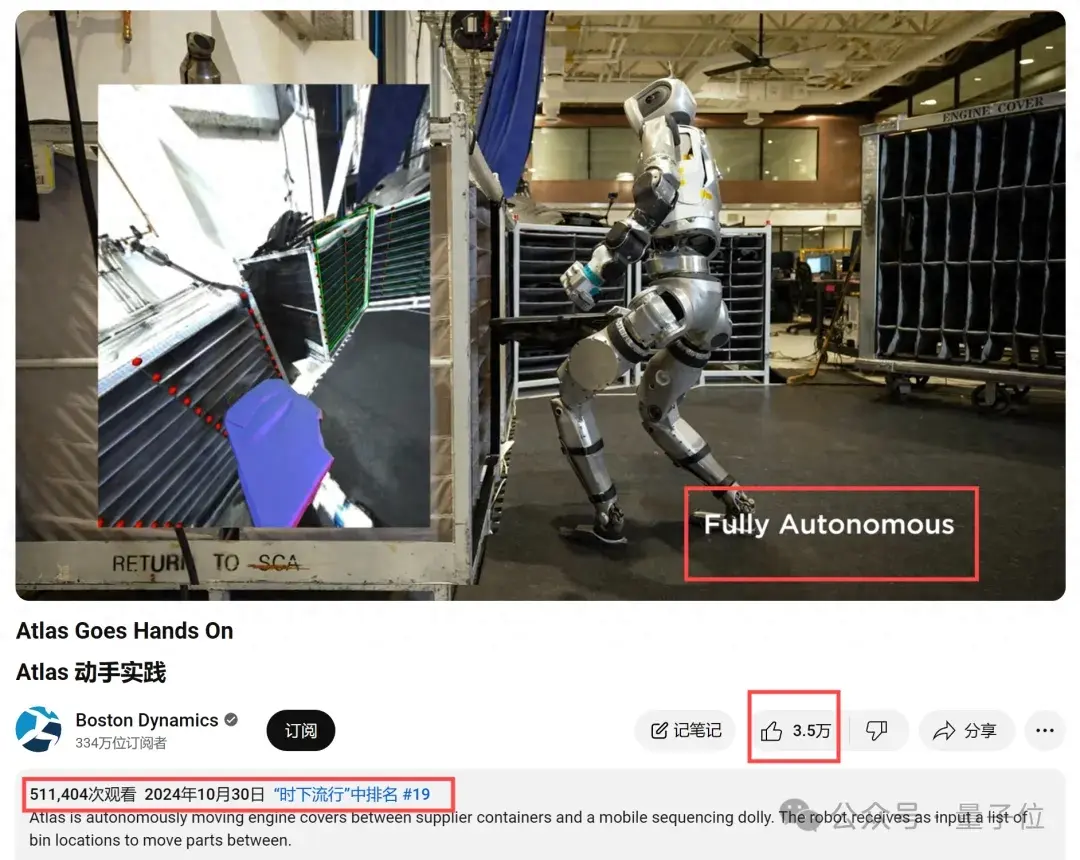
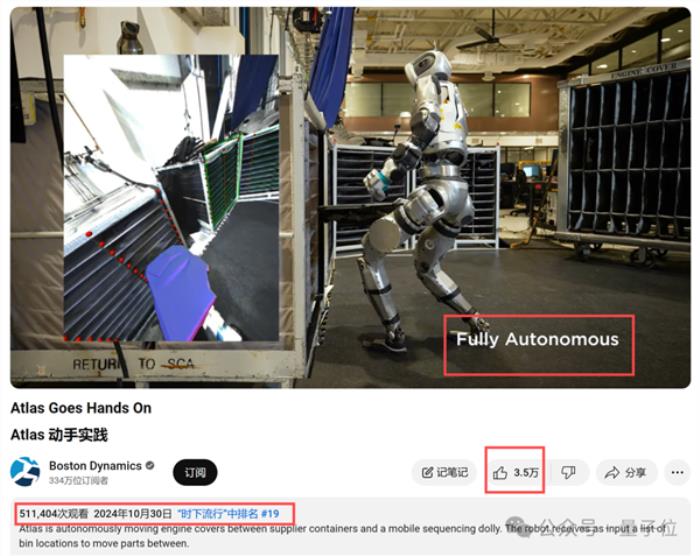
波士頓動力電驅機器人進廠打工,全程自主無遙控,50萬人在線圍觀
登上油管熱榜,吸引50萬網友圍觀,波士頓動力人形機器人又放大招了——
無遠程遙控(Fully Autonomous),Atlas可完全自主打工了。
只需告訴Atlas前后搬運的位置坐標,它就能全自動分裝物件,動作be like:

而在Atlas的第一視角下,它看到的是醬紫的:
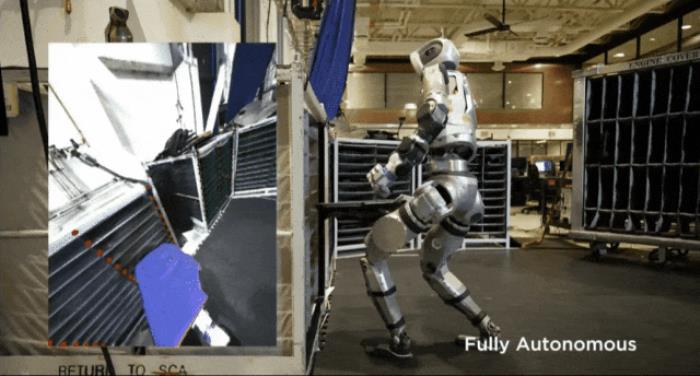
面對“刁難”(物件在底層位置),Atlas直接一個帥氣下蹲,再次成功完成任務。

更有意思的是,當發現自己弄錯位置后,Atlas突然以一個鬼畜完成了瞬間糾錯。(笑死,怪突然的)

總之,在近3分鐘demo中,Atlas進行了一系列秀肌肉操作:頭部、上半身、髖關節都能360°旋轉,可隨時轉向、倒退行走……

有網友驚呼,其他機器人還在學走路,Atlas已經開始朝九晚五,甚至007式打工了!
同行(通用倉庫機器人nimble ai創始人)大贊:Atlas已經遙遙領先了。
網友:完全自主?你引起了我的注意自從今年4月宣布改液壓為電驅后,這是波士頓動力人形機器人為數不多的露面。
上一次還是8月底,他們展示了Atlas能夠一口氣做俯臥撐、深蹲等熱身運動,當時就震驚了上百萬網友。

而在最新demo中,Atlas又瞄準了自動化控制,現在它能在集裝箱和移動小車間自主移動發動機蓋了。
據波士頓動力介紹,Atlas使用機器學習視覺模型來檢測和定位環境固定裝置和單個箱子,并且會使用專門的抓取策略,通過不斷估計被操縱物體的狀態來完成任務。

看完一系列最新表現,果不其然又驚倒了一片網友:
網友們也是紛紛cue起了特斯拉人形機器人Optimus~
前一陣,Optimus在特斯拉的發布會上同樣大秀肌肉(開場熱舞、與人交談猜丁殼、倒酒等一個不落),不過最后被多方證明存在現場遠程操控。
后來特斯拉也發布了一個展示Optimus自主導航的demo:

對于這兩家人形機器人領域同樣炙手可熱的競爭對手,網友們也開始各自站臺,并最終達成了一個“共識”。
背后的邏輯也很簡單,人形機器人最終還是要走向消費市場。
不過不管怎樣,Atlas展現的細節已十分驚艷,比如可以360°旋轉的身體、頭部。
雖然也有人吐槽這很詭異,不過大多數人表示看好:
另外,還有人疑惑為什么Atlas不搞個360°全景攝像頭,還需要轉動頭部呢?
對此,有網友推測最大原因還是控成本。
實在不行,也可以“低質量的360°全景視覺+面向單一方向的高質量相機/激光雷達”(網友支招有)。
One More Thing在reddit網友一片熱議中,部分網友發出了靈魂拷問:
對此,也有人對Atlas采用的技術表達擔憂:基于點和規劃器/優化器在泛化能力上可能不如神經網絡等。
且就在剛剛,英偉達新發布了HOVER,一個1.5M參數的神經網絡控制器,用于人形機器人的全身運動和操作協調。
據負責英偉達具身智能實驗室(GEAR)的Jim Fan介紹:
簡單說,HOVER可以被“提示”執行各種指令,英偉達稱之為“控制模式”。比如:
頭部和手部姿勢:可以通過XR設備如蘋果的Vision Pro捕捉全身姿勢:通過動作捕捉或RGB相機全身關節角度:外骨骼根速度指令:操縱桿概括而言,HOVER提供了一個統一接口,允許使用任何方便的輸入設備來控制機器人。
它簡化了收集全身遙控操作數據的方式,以便于訓練;且作為一個上游的視覺-語言-動作模型,只要提供運動指令,HOVER就能將其轉換為高頻的低級電機信號。
對此,你怎么看?
相關推薦



- 免責聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認可。 交易和投資涉及高風險,讀者在采取與本文內容相關的任何行動之前,請務必進行充分的盡職調查。最終的決策應該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產生的任何金錢損失負任何責任。
