

 新火種
2023-11-01
新火種
2023-11-01 


「逐際動力」發(fā)布首款四輪足機器人,以運動智能突破足式產品的落地和應用
通用足式機器人公司逐際動力LimX Dynamics正式發(fā)布首款全自研「四輪足機器人W1」,這是一款基于逐際動力「運動智能Motion Intelligence」開發(fā)的顛覆性產品,搭載全球頂尖的感知和運動控制算法,把腿式和輪式結構的優(yōu)勢結合于一身,配置多款全自研的高性能關節(jié),實現(xiàn)了強大的實時地形感知與全地形移動能力,大幅提高足式機器人的作業(yè)能力。通過這款四輪足產品,逐際動力瞄準中國潛力巨大的空白市場,抓住先機,為工業(yè)巡檢、物流配送、特種作業(yè)、科研教育等to B客戶帶來直擊痛點的應用體驗。逐際動力W1將于今年第四季度開始接受預訂。

逐際動力發(fā)布首款四輪足機器人W1
逐際動力四輪足機器人W1擁有顛覆性的技術和產品能力
針對通用足式機器人,逐際動力全自研高性能關節(jié),讓W1得以把四腿和四輪相結合的復合能力發(fā)揮到極致,實現(xiàn)了高動態(tài)運動與全地形越障能力,比單純的四足機器人更加高效、敏捷,更適用于大部分的落地應用場景。
搭載逐際動力基于感知的運動控制等核心算法,W1成功攻克了樓梯等難度極高的離散地形,能夠覆蓋絕大多數(shù)非輪式的復雜場景,是中國首個基于自主地形感知,通過實時步態(tài)規(guī)劃與控制,完成上下樓梯的四輪足產品。
得益于天生的形態(tài)優(yōu)勢和一流的軟硬件能力,W1具備了出色的移動效率、負載能力和續(xù)航里程,真正滿足客戶現(xiàn)實的使用要求。

逐際動力四輪足機器人W1具備出色的運動能力
目前,逐際動力四輪足機器人W1已成功通過多個復雜應用場景的能力驗證,為落地應用做好充分的準備。
高動態(tài)運動:全自研高性能關節(jié),釋放出四輪足復雜結構的超級運動能力上下樓梯:融合感知的運動控制,實現(xiàn)了輪足穩(wěn)定踏步上下樓梯上下斜坡:身體與斜坡面、地面皆可保持水平,按需靈活切換馬路牙子:靈活自由切換運動步態(tài),輕松應對各類不同離散地形的挑戰(zhàn)伏地穿越:在高速運動過程中,自由調整身體高度,適應不同作業(yè)環(huán)境的需求單邊橋:讓機器人適應地形,而不是地形適應機器人,不管地形如何變化,始終做到如履平地草地石板路:通過顛簸路面時,腿部多關節(jié)快速協(xié)同響應,降低機身姿態(tài)波動碎石路:巧妙的輪足結構可踏可滾,兼顧了足式的高通過性和輪式的高效率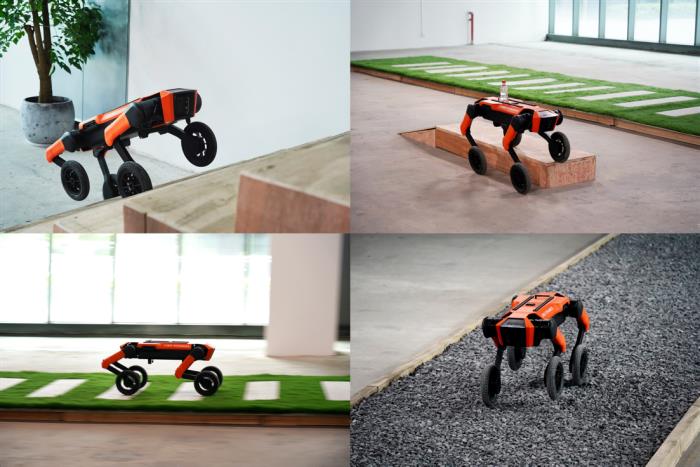
逐際動力四輪足機器人W1成功通過多個復雜應用場景的能力驗證
四輪足機器人需要具備幾乎四足機器人所有的能力,但是輪足混合帶來的感知干擾、狀態(tài)估計和運動控制的挑戰(zhàn)卻成數(shù)倍增加,全球沒有成熟的方案,難度極大,逐際動力要充分發(fā)揮輪足這一復合形態(tài)的優(yōu)勢,必須解決學術和產業(yè)界長期面臨的難題。
逐際動力全方位掌握足式機器人運動智能的核心技術,利用在地形感知、強化學習、多剛體動力學、混雜動力學、模型預測控制等領域的學術和研發(fā)經(jīng)驗,建立領先的感知與控制融合的算法框架,實現(xiàn)更高穩(wěn)定性、更強實時性的控制能力。
要實現(xiàn)從樣機到產品的飛躍,做好機器人與環(huán)境的實時交互尤為關鍵,逐際動力從創(chuàng)立之初便把感知能力與運動控制的結合作為核心技術進行攻關,并根據(jù)軟件算法定義硬件,全自研高性能關節(jié),讓四輪足機器人優(yōu)異的物理運動能力得以充分發(fā)揮。
逐際動力創(chuàng)始人張巍博士表示:“通用足式機器人正處于技術爆發(fā)期,基礎研究與商業(yè)化的交集已經(jīng)出現(xiàn),并不斷擴大,我們在恰當?shù)臅r機,選擇四輪足機器人W1作為首款主打產品,打造具有全地形移動能力的高效通用底盤。這是一款破冰的產品,錨定了接下來技術、應用和市場最佳的交集點,通過一流的技術,讓長期困擾很多足式機器人落地的難題得以解決,讓足式機器人真正走進產業(yè),創(chuàng)造價值。”
相關推薦




- 免責聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認可。 交易和投資涉及高風險,讀者在采取與本文內容相關的任何行動之前,請務必進行充分的盡職調查。最終的決策應該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產生的任何金錢損失負任何責任。
