

 新火種
2024-09-13
新火種
2024-09-13 

北大提出首個(gè)通用指令導(dǎo)航大模型系統(tǒng)|CoRL24
想象一下當(dāng)你躺在沙發(fā)上,只需要不假思索地說出指令,機(jī)器人就能幫你干活,是不是聽起來就十分愜意?
如今這種科幻電影中的場(chǎng)景正在變?yōu)楝F(xiàn)實(shí),來自北京大學(xué)的助理教授、博士生導(dǎo)師董豪團(tuán)隊(duì)近日提出首個(gè)通用指令導(dǎo)航大模型系統(tǒng)InstructNav。
不論是尋找物體,走到指定位置,還是滿足抽象的人類需求,只要你說出指令,InstructNav都能幫你實(shí)現(xiàn)。
目前該工作已經(jīng)被CoRL?(Conference on Robot Learning)2024會(huì)議錄用,文章可在Arxiv瀏覽,代碼也即將在近期開源。
 大模型如何統(tǒng)一具身指令導(dǎo)航規(guī)劃?
大模型如何統(tǒng)一具身指令導(dǎo)航規(guī)劃?不同的導(dǎo)航任務(wù)要求截然不同的能力,經(jīng)典的物體導(dǎo)目標(biāo)航任務(wù)需要理解房間結(jié)構(gòu)和物體之間的聯(lián)系,視覺語言導(dǎo)航任務(wù)側(cè)重于嚴(yán)謹(jǐn)?shù)刈裱噶睿屡d的需求驅(qū)動(dòng)的導(dǎo)航任務(wù)要求根據(jù)人類抽象需求進(jìn)行語義推理。
先前研究工作都圍繞某一種特定類型的指令設(shè)計(jì)一個(gè)特定類型的導(dǎo)航方法,然而在真實(shí)應(yīng)用中,人類可能向機(jī)器人下達(dá)不同形式的指令,甚至混合類型指令,現(xiàn)有的具身導(dǎo)航模型都無法滿足這樣的實(shí)際需求,因此實(shí)現(xiàn)通用指令導(dǎo)航對(duì)于機(jī)器人在現(xiàn)實(shí)世界的應(yīng)用充滿價(jià)值。
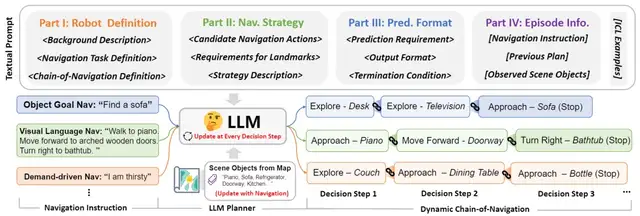
為了實(shí)現(xiàn)這一目標(biāo),作者首先提出動(dòng)態(tài)導(dǎo)航鏈路(Dynamic Chain-of-Navigation)這一全新的導(dǎo)航規(guī)劃范式,將不同類型的導(dǎo)航指令統(tǒng)一為“導(dǎo)航動(dòng)作 1 – 標(biāo)志物1 -> 導(dǎo)航動(dòng)作 2 – 標(biāo)志物 2 … ”的標(biāo)準(zhǔn)形式。
InstructNav利用大語言模型在任務(wù)規(guī)劃和常識(shí)推理上的卓越能力,根據(jù)原始指令規(guī)劃導(dǎo)航鏈路。
在導(dǎo)航過程中,InstructNav會(huì)根據(jù)最新觀測(cè)到的場(chǎng)景物體不斷更新導(dǎo)航鏈路,引導(dǎo)機(jī)器人對(duì)于環(huán)境進(jìn)行有效探索。
例如,當(dāng)指令要求“尋找沙發(fā)”時(shí),動(dòng)態(tài)導(dǎo)航鏈路會(huì)被更新為“探索 – 電視”附近區(qū)域,因?yàn)殡娨暸赃呑羁赡艽嬖谏嘲l(fā)。
 構(gòu)建大模型推理到價(jià)值地圖的映射
構(gòu)建大模型推理到價(jià)值地圖的映射以上由大模型規(guī)劃的動(dòng)態(tài)導(dǎo)航鏈路和控制機(jī)器人底層動(dòng)作之間仍然存在較大差異。
為了引導(dǎo)機(jī)器人根據(jù)動(dòng)態(tài)導(dǎo)航鏈路行動(dòng),作者提出將大模型的規(guī)劃結(jié)果映射到多源價(jià)值地圖(Multi-sourced Value Maps)上,這些價(jià)值地圖包括:
動(dòng)作價(jià)值地圖(Action Value Map):賦予待執(zhí)行動(dòng)作對(duì)應(yīng)的區(qū)域更高可導(dǎo)航價(jià)值。語義價(jià)值地圖(Semantic Value Map):賦予標(biāo)志物對(duì)應(yīng)的區(qū)域更高可導(dǎo)航價(jià)值。直覺價(jià)值地圖(Intuition Value Map):利用多模態(tài)大模型判斷全景圖中最適合移動(dòng)的區(qū)域,并賦予更高可導(dǎo)航價(jià)值。軌跡價(jià)值地圖(Trajectory Value Map):賦予遠(yuǎn)離現(xiàn)有軌跡的區(qū)域更高的可導(dǎo)航價(jià)值。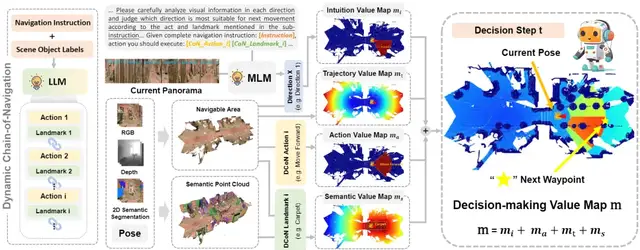
通過對(duì)多源價(jià)值地圖相加求和即可得到?jīng)Q策價(jià)值地圖(Decision-making Value Map)。
在決策價(jià)值地圖上選取最高價(jià)值點(diǎn)作為下一途徑點(diǎn),然后利用點(diǎn)到點(diǎn)的路徑規(guī)劃算法即可實(shí)現(xiàn)對(duì)于機(jī)器人底層移動(dòng)的控制。
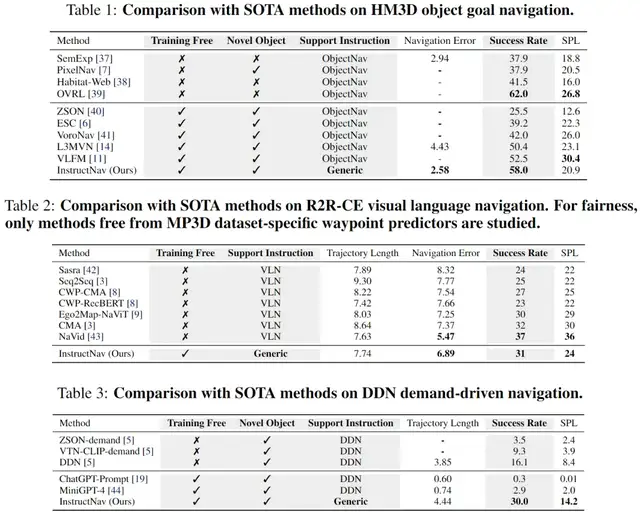
多個(gè)零樣本導(dǎo)航任務(wù)新SOTA作者在經(jīng)典的物體目標(biāo)導(dǎo)航任務(wù),視覺語言導(dǎo)航任務(wù)以及最新的需求導(dǎo)航任務(wù)上開展標(biāo)準(zhǔn)化評(píng)測(cè)。
從以下表格中可以觀察到,InstructNav首次實(shí)現(xiàn)連續(xù)環(huán)境下零樣本的視覺語言導(dǎo)航,并在零樣本的物體目標(biāo)導(dǎo)航和需求驅(qū)動(dòng)導(dǎo)航任務(wù)上全面超越所有的現(xiàn)有方法,獲得最高成功率。
文章鏈接:https://arxiv.org/pdf/2406.04882項(xiàng)目鏈接:https://sites.google.com/view/instructnav代碼鏈接:https://github.com/LYX0501/InstructNav
相關(guān)推薦

- 免責(zé)聲明
- 本文所包含的觀點(diǎn)僅代表作者個(gè)人看法,不代表新火種的觀點(diǎn)。在新火種上獲取的所有信息均不應(yīng)被視為投資建議。新火種對(duì)本文可能提及或鏈接的任何項(xiàng)目不表示認(rèn)可。 交易和投資涉及高風(fēng)險(xiǎn),讀者在采取與本文內(nèi)容相關(guān)的任何行動(dòng)之前,請(qǐng)務(wù)必進(jìn)行充分的盡職調(diào)查。最終的決策應(yīng)該基于您自己的獨(dú)立判斷。新火種不對(duì)因依賴本文觀點(diǎn)而產(chǎn)生的任何金錢損失負(fù)任何責(zé)任。
