

 新火種
2024-01-04
新火種
2024-01-04 



逐際動力首度公開人形機器人動態測試!率先實現基于實時感知動態上樓梯

作者 | ZeR0
編輯 | 漠影
智東西12月28日報道,今日,深圳機器人公司逐際動力首次公開人形機器人的動態測試,機器人代號為「星途CL-1」。
星途CL-1在國內率先實現了人形機器人從實時地形感知、步態規劃,到全身控制的全棧閉環,動態完成上樓梯、下斜坡和室內外行走等復雜場景。
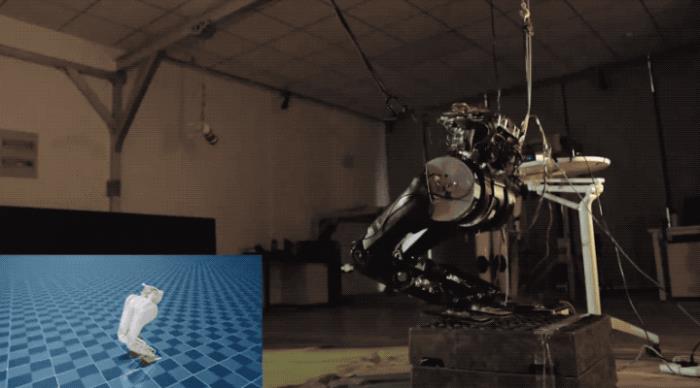
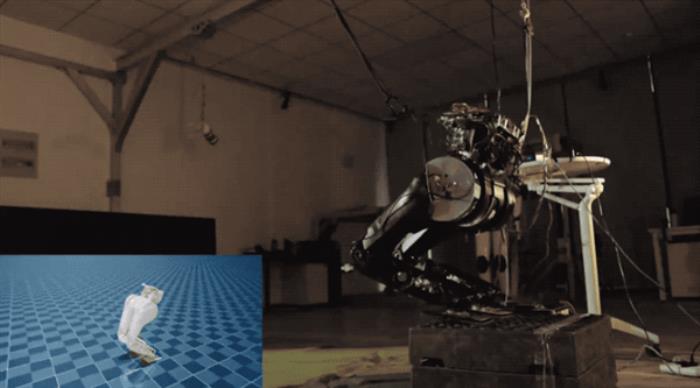
在測試中,逐際動力人形機器人星途CL-1實時感知腳下地形,主動調整步態,平順地從平地踏上臺階,并完成動態上樓梯,動作平穩流暢;然后又穩穩當當地走下了15度的斜坡。
星途CL-1更從室內走到了戶外,在不同環境下進行運動測試,從下午一直到傍晚,動態表現同樣穩定出色。
總體來看,星途CL-1具有4大亮點:
1、主動感知環境:離散地形一目了然
實時環境感知是人形機器人演進的核心技術。逐際動力推出的星途CL-1率先實現了上樓梯、下斜坡等運動,在國內率先打通基于感知的運動控制在人形機器人上的應用。
在運動控制算法和硬件的基礎上,星途CL-1增加了先進的感知算法,實現感知、控制、硬件的全回路打通,讓人形機器人突破盲走的局限,實現與復雜地形實時的交互運動。
2、先進的硬件設計:全身動態運動
逐際動力先進的硬件設計方案更好地釋放人形機器人復雜的雙臂+雙腿結構的全身運動能力,是打造一流的通用移動操作機器人平臺的重要基礎。
該公司專注解決機器人領域最難的足式本體問題,其全自研高性能關節具備優異的抗沖擊性能、精準且快速的扭矩控制能力。
在確保高性能的同時,逐際動力的設計方案也兼顧了生產制造的成本和效率優化,為整機的批量化生產奠定了基礎。
3、通用AI算法:釋放泛化能力
逐際動力對人形機器人能力的定義是:以人為中心,去人能去的地方、做人能做的事情。
其團隊不針對機器人具體的功能、形態和應用場景及其變化而定制不同的算法,不管是手臂或者雙腿的運動,是四輪足或者人形機器人,都基于同一套核心算法。
這家機器人公司專注于運動控制算法的研發,希望讓人形機器人成為AGI(通用人工智能)在物理世界的最佳載體。
4、前沿技術攻關:人形機器人全尺寸進化
點式雙足P1作為最早的形態,為人形機器人運動控制算法的開發和測試提供穩定可靠、高效易用的實踐平臺,隨著軟件算法、硬件平臺的持續迭代和完善,逐步進化為今天的全尺寸人形機器人。
星途CL-1是逐際動力人形機器人前沿技術攻關的平臺,集逐際動力全球頂尖的通用機器人軟件算法和硬件設計于一身,作為初代機型,已率先完成感知、控制、硬件的核心技術攻關,是開展具身智能研發的最佳測試平臺。
結語:基于先進算法與硬件設計,擬落地To B和To C應用場景
作為國內首款基于實時地形感知動態上樓梯的人形機器人,星途CL-1在測試全過程保持動態運動和全身的協調與平衡,這有賴于逐際動力先進的運動控制和AI算法,以及基于軟件自研的高性能關節。
隨著技術不斷迭代,逐際動力的人形機器人將陸續投入到危險場景、高端服務、汽車制造和家庭服務等To B和To C的應用場景。
相關推薦


- 免責聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認可。 交易和投資涉及高風險,讀者在采取與本文內容相關的任何行動之前,請務必進行充分的盡職調查。最終的決策應該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產生的任何金錢損失負任何責任。
