

 新火種
2025-02-26
新火種
2025-02-26 


會扭秧歌拋手絹的機器人什么來路?宇樹科技人形機器人UnitreeH1首登春晚,網友:“機器人都進化到這種程度了?”【附人形機器人產業技術分析】

圖源:宇樹科技
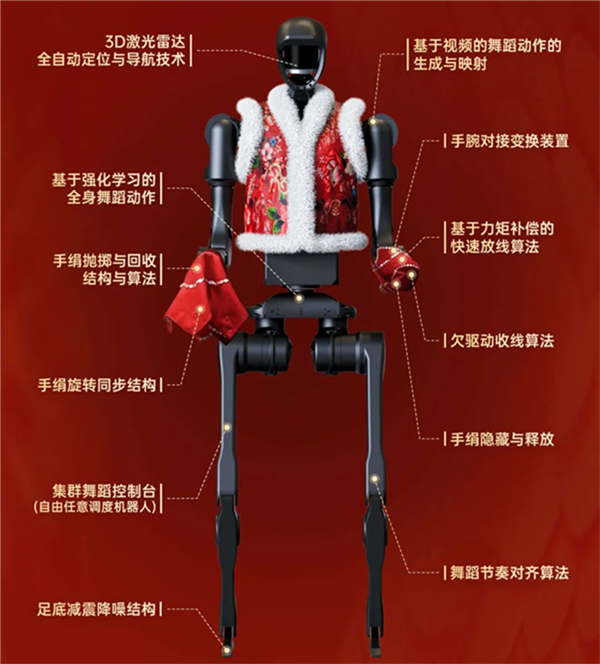
1月29日,杭州宇樹科技旗下的人形機器人H1在2025年央視春晚舞臺上驚艷亮相,與新疆藝術學院的舞蹈演員們聯袂上演了創意融合舞蹈《秧Bot》。節目中,16臺H1機器人身著紅色秧歌服,手持紅手帕,與演員們默契配合,動作精準流暢,展現出科技與藝術的完美融合。
H1是宇樹科技于2023年8月推出的首款全尺寸人形機器人。為了凸顯機械感,春晚舞臺上的H1去掉了外皮殼體,僅保留骨架。據宇樹科技介紹,H1的動作設計基于舞蹈要求,通過AI訓練實現激光SLAM定位,能夠全自動走位和變換隊形。此外,H1還搭載了舞蹈節奏對齊算法、基于強化學習的全身舞蹈動作算法,配備了手絹拋與回收結構及算法,支持手絹的隱藏與釋放。
盡管H1在舞蹈中表現出色,但其行走能力仍有待提升。節目結束時,所有機器人需要演員“攙扶”離場。不過,這一表演仍贏得了觀眾的廣泛贊譽,有網友表示:“機器人都進化到這種程度了,這是今年春晚最好玩的節目”。
據中國企業數據庫企查貓搜索顯示,宇樹科技成立于2016年,曾于牛年春晚展示其四足機器小牛“犇犇”,這家公司最初是以機器狗起家,也是全球首家公開零售高性能四足機器人并最早實現行業落地的公司。

——技術架構:算法是核心需與硬件匹配
人形機器人本質是AI系統落地物理世界的最佳載體,算法是核心,需與硬件匹配。雖然人形機器人本體硬件存在抗壓硬度與靈敏度不足的問題,但更核心問題在于算法對運動能力的控制需要技術支撐。

——大模型具身智能:是突破方向
以往由于算法模型的局限,機器人難以實現通用化,而大模型的出現補全了讓機器人能力實現躍升的技術基礎,大模型為人形機器人的發展帶來了新的突破。大模型的向量應用使機器人具備更高的事物處理能力。具身智能是指一種智能系統或機器能夠通過感知和交互與環境(物理世界)產生實時互動的能力,AI+機器人是具身智能當前的落點。

——硬件技術:諧波減速器和六維力傳感器技術壁壘高
作為機器人的關鍵零部件,精密減速器能降低轉速并增大扭矩,在機器人動力系統中,主要用于傳導伺服電機的動力,調整速度和扭矩,以精確控制機器人動作。在三類主要的精密減速器中,諧波減速器的整體技術壁壘較高,包括專利、材料配方、工藝及裝配等方面。近幾年我國諧波減速器國產化加速,涌現了綠的諧波、來福諧波、同川科技、大族諧波等企業,逐步提升市場份額。

力傳感器是機器人機械臂的關鍵部件之一,用于模擬關節及肢體末端觸感。其中,六維力傳感器是維度最高的傳感器,可用于機器人末端力和力矩的測量場景,幫助機器人實現高精度控制與操作。六維力傳感器技術壁壘較高,不僅研發生產難度大,生產成本也較高。

在2025年1月13日的采訪中,宇樹科技創始人王興興就人形機器人技術路線問題發表了自己的看法。他指出,目前人形機器人領域尚未形成統一的技術路線,仍處于多種技術路線并存的階段。例如,特斯拉的技術路線、宇樹科技的低成本輕量化路線以及線驅動路線等,都在各自的探索中。王興興認為,目前這些技術路線都還在嘗試階段,尚未有絕對可靠的技術路線脫穎而出,整個行業也還未迎來類似ChatGPT那樣的突破性時刻。
王興興進一步指出,具身智能領域的熱度非常高,但行業發展的天花板主要取決于機器人AI的突破程度。如果AI技術無法突破現有瓶頸,行業增長可能僅維持在50%到100%的線性增速。然而,一旦AI技術突破臨界點,整個產業將迎來爆發式增長,屆時所有大型公司都將紛紛涌入這一領域。
相關推薦



- 免責聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認可。 交易和投資涉及高風險,讀者在采取與本文內容相關的任何行動之前,請務必進行充分的盡職調查。最終的決策應該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產生的任何金錢損失負任何責任。
