

 新火種
2025-02-21
新火種
2025-02-21 


硬核操作!機器人上太空做“體檢”也穿梭自如!
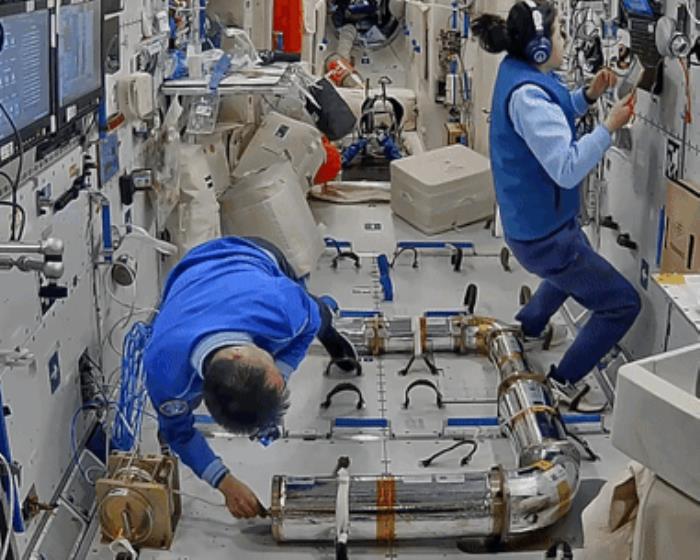
2月21日消息,據央視報道,近期,中國空間站航天技術試驗領域成功完成了空間站管道檢測機器人在軌試驗。
那么,你想了解管道檢測機器人在軌試驗如何開展的嗎?
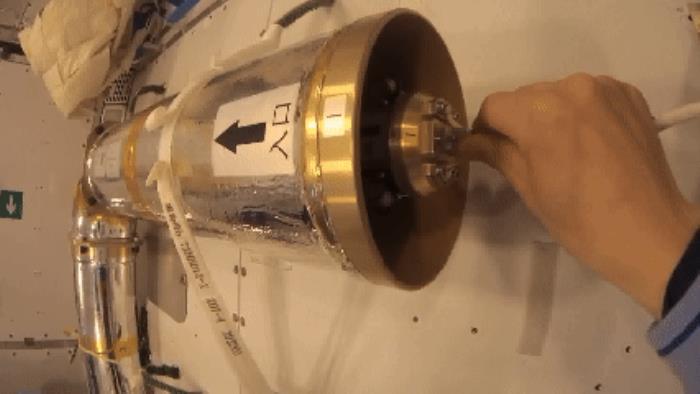
據悉,航天員在軌搭建了包含不同直徑的直管、彎管、錐管的模擬管道,在模擬管道內開展了機器人運動能力試驗、收縮狀態下管道機器人拉出試驗和機器人狀態微調后拉出試驗。
試驗過程中,機器人平穩可靠地通過多種直徑的直管、彎管、錐管,驗證了適應多種復雜管道的機器人自主運動技術;機器人斷電后可輕松地從復雜管道內拉出,驗證了機器人被動柔順機構的安全性。

在軌開展試驗過程中,地面人員通過地面支持崗軟件同步觀測機器人的位置、電流、接觸力等狀態數據,實時監控機器人運動狀態,協助航天員完成在軌操作。同時,地面人員通過分析獲取的相關數據,評估試驗結果,為后續試驗提供依據。
據了解,本次管道檢測機器人在軌試驗,是我國空間站開展的首個艙內特種作業機器人在軌試驗,驗證了適應多種復雜管道的大變徑比管道機器人設計和多級協調全身運動控制等關鍵技術,證明了機器人在空間站管道復雜環境下的自主適應運動能力和安全性,為未來在空間站管道的實際應用積累了寶貴經驗。
在這里,順便科普一下管道檢測機器人面臨的哪些挑戰。
空間站管道結構復雜,管徑跨度大、突變、不連續,機器人適應空間站管道完成自主運動是一大挑戰;
機器人在管道內運動,既要確保機器人與管壁接觸力對管徑變化的適應性,還要確保意外情況下不能卡滯在管道中,因此管道機器人在管道中的運動安全性也是一大挑戰。
值得一提的是,管道機器人借鑒了棘皮動物(如海星、海膽、海參等)的管足器官“靜止時收縮于體內,運動時向外延伸”的運動機理,提出了“自主伸張、受力收縮、無電變柔”的仿生變剛度設計思路,設計了主被動結合的腿部剪叉伸縮機構。

這樣既能適應復雜的空間站管道,又可以保證空間站管道的安全,解決了空間站管道復雜環境自主適應和運動安全性的兩大難題。
機器人采用兩頭兩尾前后對稱的模塊化結構,具有23個自由度,配備位置、力等多種類型傳感器。機器人的“智慧大腦”利用全身傳感器信息計算管道機器人的姿態、位置,并給出運動策略,在保障管道安全的前提下,調整全身各關節位置、速度、力的輸出,使機器人平穩地在空間站管道內運動。
好了,那么,現在來欣賞下管道檢測機器人在軌驗證視頻吧!
相關推薦



- 免責聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認可。 交易和投資涉及高風險,讀者在采取與本文內容相關的任何行動之前,請務必進行充分的盡職調查。最終的決策應該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產生的任何金錢損失負任何責任。
