

 新火種
2024-11-17
新火種
2024-11-17 


Nullmax紐勱持續發力,論文入選計算機視覺領域頂會CVPR2024
原標題:Nullmax紐勱持續發力,論文入選計算機視覺領域頂會CVPR 2024
當地時間6月17日至6月21日于美國西雅圖舉辦的IEEE國際計算機視覺與模式識別會議(CVPR 2024)CVPR(IEEE Conference on Computer Vision and Pattern Recognition)上,Nullmax紐勱的最新研究成果《Enhancing 3D Object Detection with 2D Detection-Guided Query Anchors》成功入選。
CVPR作為全球計算機視覺和模式識別領域的頂級會議,每年吸引著來自世界各地的頂尖學者和研究人員。其收錄的論文代表了計算機視覺領域的最新發展方向和最高研究水平,入選標準嚴苛。Nullmax紐勱研究成果入選CVPR,這充分證明了Nullmax紐勱在計算機視覺領域內的技術實力和創新成果,獲得了國際頂級會議的高度認可。
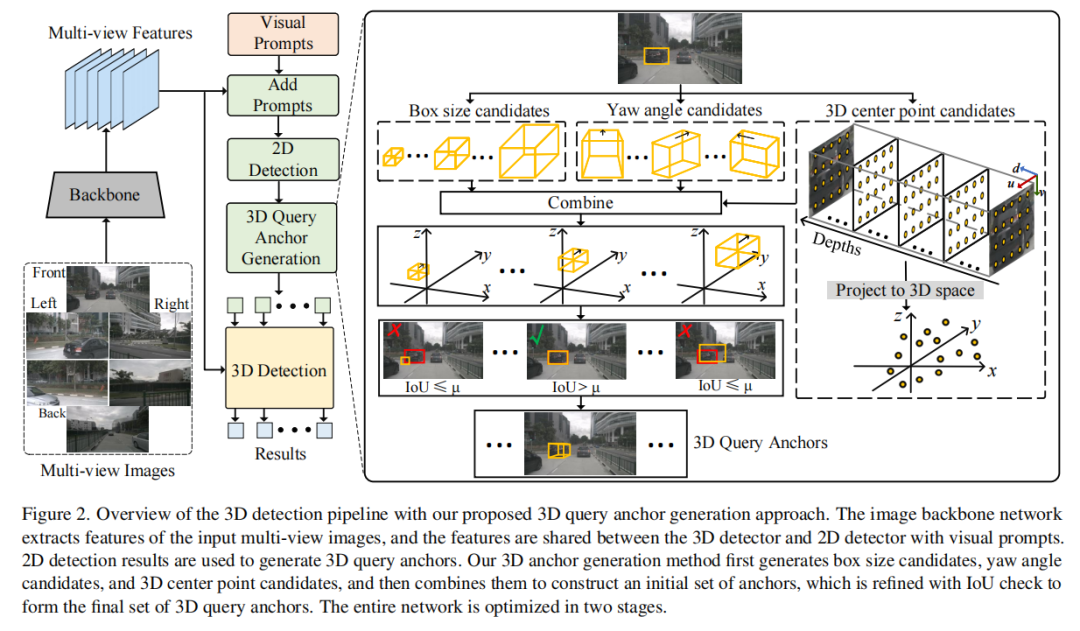
Nullmax紐勱此次入選的論文,提出了名為QAF2D(Query Anchor From 2D)的多相機3D目標檢測新方法,通過2D檢測結果指導生成3D查詢錨點(Query Anchor),顯著提升了多相機3D目標檢測的性能。
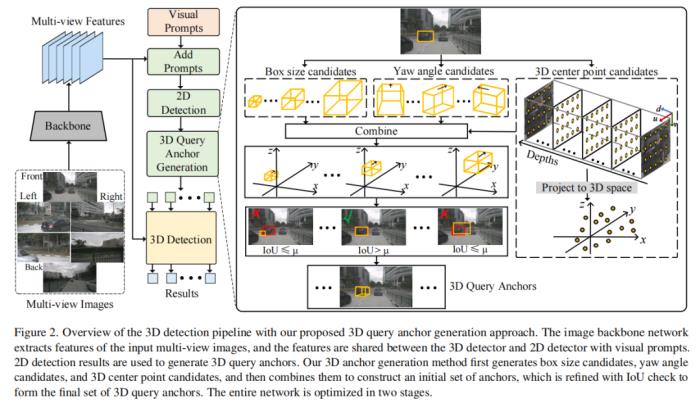
同時,Nullmax紐勱還采用視覺提示(Visual Prompt)設計了一套兩階段的優化方法該方法讓2D和3D檢測器共用圖像特征提取網絡,從而在不影響3D檢測器性能的前提下,降低了模型訓練和部署的資源消耗。
在nuScenes數據集上的實驗結果顯示,QAF2D方法取得了顯著的性能提升,平均提升1.18% NDS和1.74% mAP,最大提升更是高達2.3% NDS和2.7% mAP。這一成果的取得,對于提升自動駕駛系統的整體表現,尤其是增強系統駕駛的安全性具有重要意義。
在自動駕駛領域,3D目標檢測是障礙物檢測等任務的關鍵技術。Nullmax紐勱此次提出的QAF2D方法,不僅提升了3D目標檢測的性能,還有望進一步降低自動駕駛系統的硬件資源需求,為自動駕駛技術的量產和普及提供了有力支持。
作為一家領先的自動駕駛技術企業,Nullmax紐勱自2016年成立以來,已經跨過了以產品技術開發、量產項目落地為主要標志的1.0和2.0發展階段。如今,Nullmax正進入3.0新階段,加速推進量產的同時,也在不斷擴大對新一代技術的研發,以打造更高階的自動駕駛形態。
此次論文入選CVPR 2024,是Nullmax紐勱在自動駕駛感知技術領域持續發力的又一力證。未來,Nullmax紐勱將繼續秉承“智變引領者”的愿景,不斷探索和創新,為自動駕駛技術的落地貢獻力量。同時,也期待更多有志于自動駕駛的優秀人才加入Nullmax紐勱,共同探索最新技術的研發及應用。
免責聲明:本文為企業宣傳商業資訊,僅供用戶參考,如用戶將之作為消費行為參考,鳳凰網敬告用戶需審慎決定。
相關推薦



- 免責聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認可。 交易和投資涉及高風險,讀者在采取與本文內容相關的任何行動之前,請務必進行充分的盡職調查。最終的決策應該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產生的任何金錢損失負任何責任。
