

 新火種
2023-09-26
新火種
2023-09-26 


豐田研究院亮出機器人AI大招,無須人工編碼,利用觸覺高效學習新技能

智東西
編譯 | 陳佳慧
編輯 | 徐珊
智東西9月21日消息,據The Verge報道,豐田研究院(TRI)成功研發出一種突破性的生成式AI技術即機器人行為模型,在“機器人幼兒園”中教導機器人各種靈巧的技能。該機器人行為模型基于AI的擴散策略,可以在數十次新技能的演示后學習新技能。
運用該機器人行為模型,能讓機器人產出一致性強、可重復和高性能的結果。而且機器人學習和產出的速度極快,不再需要人工來進行編碼和修復編碼錯誤,提高了機器人的實用性,也在構建機器人大型行為模型(LBM)方向上邁進了一步。
一、機器人也上學,通過機器人行為模型掌握超60項挑戰性技能
據TOYOTA官網公告,以前,教機器人新行為的技術進展緩慢、效率較低,而且一般在執行任務時有很多限制性條件,所執行的任務也是非常具體和細節的。機器人專家需要花費大量時間編寫復雜的代碼,可能還要不斷修改代碼錯誤,以此為機器人添加新行為。
現在,有了機器人行為模型。研究員認為,觸覺是這個機器人行為模型的關鍵要素。他們給機器人提供了一種大拇指般大小的觸覺傳感器,能夠讓機器人通過觸覺來感知和學習,從而像人類一樣更輕松地執行各種復雜任務。據The Verge報道,研究人員就曾在“機器人幼兒園”教機器人如何做早餐。
“機器人幼兒園”的運作方式是,首先由一位“老師”展示一套技能,然后機器人的模型在后臺學習幾個小時,最后機器人成功形成新的工作行為。豐田研究院的靈巧操縱實驗室經理Ben Burchfiel說,他們經常是在下午教機器人,讓它學習一晚上,第二天早上就可以來看到它的新行為了。
到目前為止,研究人員已經使用機器人行為模型,成功培訓機器人獲得了超過60項具有挑戰性的技能,例如倒液體、使用工具以及操控可變形物體等。并且他們希望在2024年底前將這個數字增加到1000項。
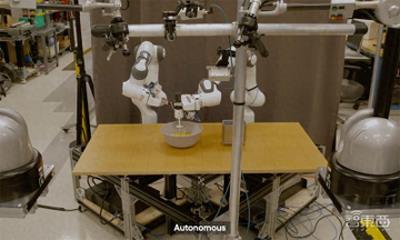
機器人攪拌液體(圖源:TOYOTA官網)
二、自主觀察學習新技能,機器人大型行為模型正在創建
豐田研究院的研究人員在研發出現在的機器人行為模型后,還試圖為機器人創建大型行為模型。豐田研究院機器人研究副總裁Russ Tedrake說,大型行為模型與大語言模型類似,是通過觀察來學習,然后能夠執行從沒有教過的新技能。
谷歌在其AI學習模型機器人變壓器RT-2的研發中,其實也在研究類似的技術。與豐田研究人員的方法類似,他們的機器人利用自己獲得的經驗來推斷如何執行任務。從理論上講,經過AI訓練的機器人最終可以實現,只給出一個大致方向,而不需要任何具體的行動指令就可以完成任務,例如“清理那個溢出的東西”。
不過,根據紐約時報報道,谷歌的機器人研發還有很長的路要走。同時,泰晤士報也稱,研究工作通常是“緩慢而費力的”,提供足夠的訓練數據比向AI模型提供從互聯網下載的數據要難得多。
結語:機器人獲得觸覺提升技能學習速度,未來或能實現機器人自主拓展新技能
豐田研究院的機器人行為模型讓機器人獲得了觸覺,相比于從前訓練機器人的人工編碼和錯誤查找,新模型不僅減少了人力付出,也提高了機器人學習新技能的速度,讓機器人能夠幫助人們更快、更好地完成更多任務。
而豐田研究院研究人員稱,他們正在構建機器人大型行為模型,谷歌也在不斷嘗試開發類似技術。有了現在的機器人行為模型的出現,在研究院與科技公司的探索下,未來機器人大型行為模型或許也有可能成為現實,機器人通過觀察自主拓展新技能也有可能實現。
來源:The Verge
相關推薦




- 免責聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認可。 交易和投資涉及高風險,讀者在采取與本文內容相關的任何行動之前,請務必進行充分的盡職調查。最終的決策應該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產生的任何金錢損失負任何責任。
