

 新火種
2024-05-08
新火種
2024-05-08 


特斯拉機器人進廠打工,馬斯克:手的自由度今年將達到22個!
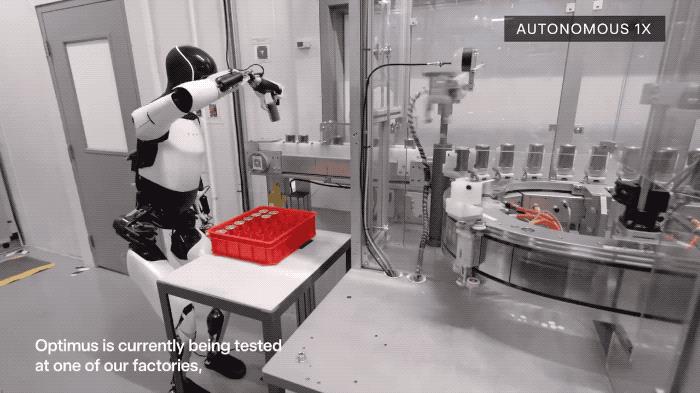
特斯拉機器人Optimus最新視頻出爐,已經可以在廠子里打工了。
正常速度下,它分揀電池(特斯拉的4680電池)是這樣的:

官方還放出了20倍速下的樣子——在小小的“工位”上,揀啊揀啊揀:

這次放出的視頻亮點之一在于Optimus在廠子里完成這項工作,是完全自主的,全程沒有人為的干預。
并且在Optimus的視角之下,它還可以把放歪了的電池重新撿起來放置,主打一個自動糾錯:

對于Optimus的手,英偉達科學家Jim Fan給出了高度的評價:
而就在Jim Fan的評論區,馬斯克還現身透露了一個更重磅的消息:

不過有一說一,視頻中展示Optimus分揀自家電池還只是“開胃菜”。
這一次,特斯拉罕見地公布了機器人的訓練詳情。
 和特斯拉汽車相似的邏輯
和特斯拉汽車相似的邏輯
首先在神經網絡方面,從視頻中的字幕中可以得知,特斯拉給Optimus部署的是一個端到端的神經網絡來訓練分揀電池的任務。
也正因如此,Optimus所用到的數據僅僅是來自于2D攝像頭和手部的觸覺、力度傳感器,并直接生成關節控制序列。

特斯拉工程師Milan Kovac進一步透露,這個神經網絡完全是在機器人的嵌入式FSD計算機上運行,并且由機載電池供電:
在訓練數據方面,我們可以看到是人類戴著VR眼鏡和手套,通過遠程操作的方式來采集:

對于這一點,Jim Fan認為:
這是因為人類對自己的動作和機器人的動作之間哪怕是最小的延遲都非常敏感。
而Optimus恰好有一個流體全身控制器,可以實時執行人體姿勢。
并且特斯拉機器人已經將這種模式擴展到了其它任務中:

如此規模也是令Jim Fan大受震驚的一點:
不僅如此,從視頻中Optimus們正在執行的任務來看也是多種多樣,有分揀電池的,有疊衣服的,還有整理物品的。
Milan Kovac表示特斯拉在其中一家工廠已經部署了幾個機器人,它們每天正在真實的工作站接受測試并不斷改進。
總而言之,Optimus單是從視覺和人類示范來進行訓練來看,這一點上是和特斯拉汽車的邏輯是有點類似了。
在視頻的最后,官方還曝出Optimus另一個能力上的提升——可以走更遠的路了:
 One More Thing
One More Thing
Jim Fan的實驗室也在這兩天放出了一個新進展——
讓機器狗踩著瑜伽球行走!

而它的訓練方法和特斯拉Optimus截然不同,是完全在模擬環境中進行,然后零樣本遷移到真實世界中,無需微調,直接運行。
具體背后的技術則是團隊新推出的DrEureka,它是以之前五指機器人轉筆背后的技術Eureka為基礎。
DrEureka是一個LLM智能體,可以編寫代碼來訓練機器人在模擬中的技能,并編寫更多的代碼來彌合困難的模擬與現實之間的差距。
簡而言之,它完全自動化了從新技能學習到現實世界部署的流程。
而相較于特斯拉Optimus和英偉達機器狗的訓練方式,Jim Fan也做了個靈魂總結:
并且也有網友對此表示認同:
那么你覺得呢?
相關推薦



- 免責聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認可。 交易和投資涉及高風險,讀者在采取與本文內容相關的任何行動之前,請務必進行充分的盡職調查。最終的決策應該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產生的任何金錢損失負任何責任。
