

 新火種
2024-01-03
新火種
2024-01-03 


實例解析神經(jīng)網(wǎng)絡(luò)的工作原理

來源:算法進階本文約4800字,建議閱讀8分鐘
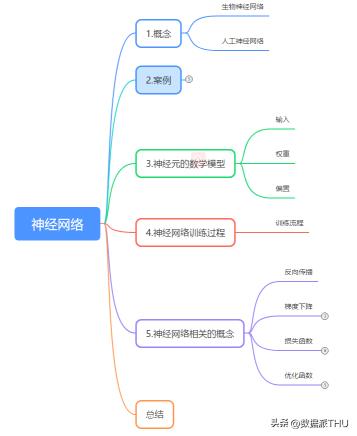
本文介紹了神經(jīng)網(wǎng)絡(luò)的工作原理。
在機器學習和相關(guān)領(lǐng)域,人工神經(jīng)網(wǎng)絡(luò)的計算模型靈感正是來自生物神經(jīng)網(wǎng)絡(luò):每個神經(jīng)元與其他神經(jīng)元相連,當它興奮時,就會像相鄰的神經(jīng)元發(fā)送化學物質(zhì),從而改變這些神經(jīng)元內(nèi)的電位;如果某神經(jīng)元的電位超過了一個閾值,那么它就會被激活(興奮),向其他神經(jīng)元發(fā)送化學物質(zhì)。
人工神經(jīng)網(wǎng)絡(luò)通常呈現(xiàn)為按照一定的層次結(jié)構(gòu)連接起來的“神經(jīng)元”,它可以從輸入的計算值,進行分布式并行信息處理的算法數(shù)學模型。這種網(wǎng)絡(luò)依靠系統(tǒng)的復雜程度,通過調(diào)整內(nèi)部大量節(jié)點之間相互連接的關(guān)系,從而達到處理信息的目的。并且它也被用于估計或可以依賴于大量的輸入和一般的未知近似函數(shù),來最大化的擬合現(xiàn)實中的實際數(shù)據(jù),提高機器學習預測的精度。
概要
單純的講神經(jīng)網(wǎng)絡(luò)的概念有些抽象,先通過一個實例展示一下機器學習中的神經(jīng)網(wǎng)絡(luò)進行數(shù)據(jù)處理的完整過程。
1 神經(jīng)網(wǎng)絡(luò)的實例
1.1 案例介紹
實例:訓練一個神經(jīng)網(wǎng)絡(luò)模型擬合 廣告投入(TV,radio,newspaper 3種方式)和銷售產(chǎn)出(sales)的關(guān)系,實現(xiàn)根據(jù)廣告投放來預測銷售情況。
樣本數(shù)據(jù):

樣本數(shù)據(jù)
TV,radio和newspaper是樣本數(shù)據(jù)的3個特征,sales是樣本標簽。
1.2 準備數(shù)據(jù)
#添加引用import tensorflow as tfimport pandas as pdimport numpy as np#加載數(shù)據(jù)data = pd.read_csv('../dataset/Advertising.csv')#pd 是數(shù)據(jù)分析庫pandas# 建立模型 根據(jù)tv,廣播,報紙投放額 預測銷量print(type(data),data.shape)### (200, 5)#取特征 x取值除去第一列和最后一列的值取出所有投放廣告的值x = data.iloc[:,1:-1]#200*3#y取值最后一列銷量的值 標簽y = data.iloc[:,-1] #200*1 1.3 構(gòu)建一個神經(jīng)網(wǎng)絡(luò)
建立順序模型:Sequential
隱藏層:一個多層感知器(隱含層10層Dense(10),形狀input_shape=(3,),對應(yīng)樣本的3個特征列,激活函數(shù)activation="relu"),
輸出層:標簽是一個預測值,緯度是1
model = tf.keras.Sequential([tf.keras.layers.Dense(10,input_shape=(3,),activation="relu"),tf.keras.layers.Dense(1)])模型結(jié)構(gòu) print(model.summary())
模型結(jié)構(gòu)
說明:
1)keras的模型,Sequential表示順序模型,因為是全連接的,選擇順序模型
2)tf.keras.layers.Dense 是添加網(wǎng)絡(luò)層數(shù)的API
3)隱藏層參數(shù) 40個,10個感知器(神經(jīng)元),每個感知器有4個參數(shù)(w1,w2,w3,b),總共10*4 = 40
4)輸出層參數(shù)11個,1個感知器(神經(jīng)元),參數(shù)(w1,w2,w3,w4,w5,w6,w7,w8,w9,w10,b)共11個
5)模型參數(shù)個數(shù)總計40+11 = 51個
1.4 給創(chuàng)建的模型加入優(yōu)化器和損失函數(shù)
# 優(yōu)化器adam,線性回歸模型損失函數(shù)為均方差(mse)
model.compile(optimizer="adam",loss="mse")1.5 啟動訓練
# 訓練模型
model.fit(x,y,epochs=100)x 是樣本的特征;y 是樣本的標簽
epochs 是梯度下降中的概念,當一個完整的數(shù)據(jù)集通過了神經(jīng)網(wǎng)絡(luò)一次并且返回了一次,這個過程稱為一個 epoch;當一個 epoch 對于計算機而言太龐大的時候,就需要把它分成多個小塊,需要設(shè)置batch_size,這部分內(nèi)容在后面的梯度下降章節(jié)再詳細介紹。
1.6 使用模型預測
# 使用該模型在現(xiàn)有數(shù)據(jù)上預測前10個樣本的銷量
test = data.iloc[:10,1:-1]print('測試值',model.predict(test))以上步驟展示一個神經(jīng)網(wǎng)絡(luò)模型的構(gòu)建,訓練和預測的全部過程,下面再介紹一下原理。
2 神經(jīng)元的數(shù)學模型
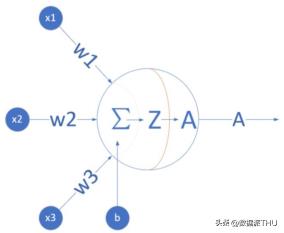
神經(jīng)元的數(shù)學模型
輸入 input
(x1, x2, x3) 是外界輸入信號,一般是一個訓練數(shù)據(jù)樣本的多個屬性/特征,可以理解為實例中的3種廣告投放方式。
權(quán)重 weights
(w1,w2,w3) 是每個輸入信號的權(quán)重值,以上面的 (x1,x2,x3)的例子來說,x1的權(quán)重可能是 0.92,x2的權(quán)重可能是 0.2,x3的權(quán)重可能是 0.03。當然權(quán)重值相加之后可以不是 1。
偏移bias
還有個 b 是怎么來的?一般的書或者博客上會告訴你那是因為 y=
3 神經(jīng)網(wǎng)絡(luò)訓練過程
還是以前面的廣告投放為例,神經(jīng)網(wǎng)絡(luò)訓練之前需要先搭建一個網(wǎng)絡(luò),然后填充數(shù)據(jù)(加入含特征和標簽的樣本數(shù)據(jù))訓練,訓練的過程就是不斷更新權(quán)重w和偏置b的過程。輸入有10層,每一層的特征個數(shù)由樣本確定(實例中的3種廣告投放方式即3個特征列),每一層參數(shù)就有4個(w1,w2,w3,b),全連接時10層相當于10*4=40 個參數(shù)。如下是一個單層神經(jīng)網(wǎng)絡(luò)模型,但是有2個神經(jīng)元。
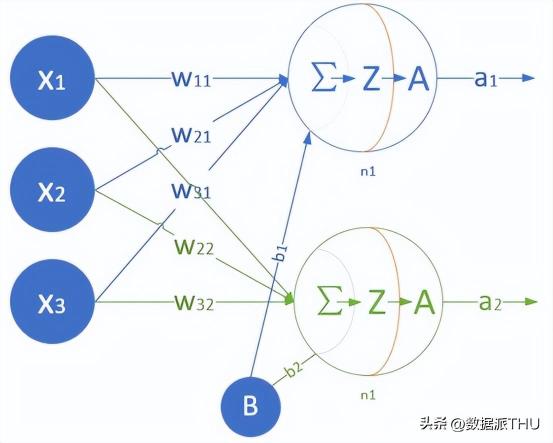
2個神經(jīng)元的模型
訓練流程
訓練的過程就是不斷更新權(quán)重w和偏置b的過程,直到找到穩(wěn)定的w和b 使得模型的整體誤差最小。具體的流程如下:
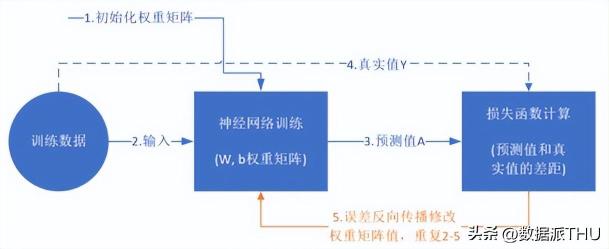
訓練過程示意圖
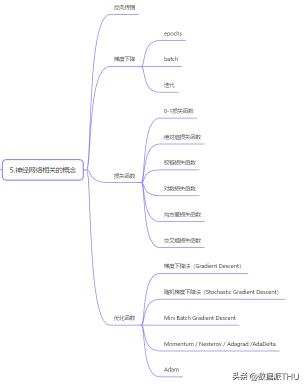
4 神經(jīng)網(wǎng)絡(luò)相關(guān)的概念
4.1 反向傳播
反向傳播算法是一種高效計算數(shù)據(jù)流圖中梯度的技術(shù),每一層的導數(shù)都是后一層的導數(shù)與前一層輸出之積,這正是鏈式法則的奇妙之處,誤差反向傳播算法利用的正是這一特點。
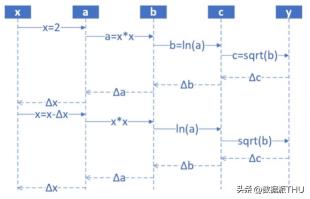
反向傳播算法示意圖
前饋時,從輸入開始,逐一計算每個隱含層的輸出,直到輸出層。
正向過程
step1,輸入層,隨機輸入第一個 x值,x 的取值范圍 (1,10],假設(shè)x是 2;
step2,第一層網(wǎng)絡(luò)計算,接收step1傳入 x 的值,計算:a=x^2;
step3,第二層網(wǎng)絡(luò)計算,接收step2傳入 a 的值,計算:b=ln (a);
step4,第三層網(wǎng)絡(luò)計算,接收step3傳入 b 的值,計算:c=sqrt{b};
step5,輸出層,接收step4傳入 c 的值
然后開始計算導數(shù),并從輸出層經(jīng)各隱含層逐一反向傳播。為了減少計算量,還需對所有已完成計算的元素進行復用。
反向過程
反向傳播 --- 每一層的導數(shù)都是后一層的導數(shù)與前一層輸出之積
step6,計算y與c的差值:Δc = c-y,傳回step4
step7,step4 接收step5傳回的Δc,計算Δb = Δc*2sqrt(b)
step8,step3 接收step4傳回的Δb,計算Δa = Δb*a
step9,step2 接收step3傳回的Δa,計算Δx = Δ/(2*x)
step10,step1 接收step2傳回的Δx,更新x(x-Δx),回到step1,從輸入層開始下一輪循環(huán)
4.2 梯度下降
梯度下降是一個在機器學習中用于尋找最佳結(jié)果(曲線的最小值)的迭代優(yōu)化算法,它包含了如下2層含義:
梯度:函數(shù)當前位置的最快上升點;下降:與倒數(shù)相反的方向,用數(shù)學語言描述的就是那個減號,亦即與上升相反的方向運動,就是下降,代價函數(shù)減小。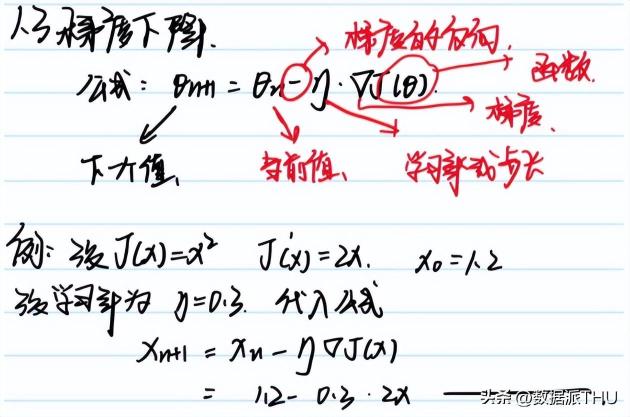
梯度下降數(shù)學公式
其中:
θ(n+1):下一個值θ(n):當前值-:減號,梯度的反向,η:學習率或步長,控制每一步走的距離,不要太快,避免錯過了極值點;也不要太慢,以免收斂時間過長▽:梯度 ,函數(shù)當前位置的最快上升點J(θ):函數(shù)梯度下降算法是迭代的,意思是需要多次使用算法獲取結(jié)果,以得到最優(yōu)化結(jié)果。梯度下降的迭代性質(zhì)能使欠擬合的圖示演化以獲得對數(shù)據(jù)的最佳擬合。
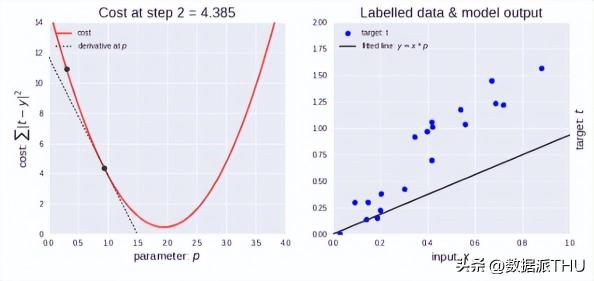
梯度下降算法示意圖
如上圖左所示,剛開始學習率很大,因此下降步長更大。隨著點下降,學習率變得越來越小,從而下降步長也變小。同時,代價函數(shù)也在減小,或者說代價在減小,有時候也稱為損失函數(shù)或者損失,兩者都是一樣的。
在一般情況下,一次性將數(shù)據(jù)輸入計算機是不可能的。因此,為了解決這個問題,我們需要把數(shù)據(jù)分成小塊,一塊一塊地傳遞給計算機,在每一步的末端更新神經(jīng)網(wǎng)絡(luò)的權(quán)重,擬合給定的數(shù)據(jù)。這樣就需要了解 epochs,batch size 這些概念。
epochs
當一個完整的數(shù)據(jù)集通過了神經(jīng)網(wǎng)絡(luò)一次并且返回了一次,這個過程稱為一個 epoch。然而,當一個 epoch 對于計算機而言太龐大的時候,就需要把它分成多個小塊。
設(shè)置epoch 的個數(shù)
完整的數(shù)據(jù)集在同樣的神經(jīng)網(wǎng)絡(luò)中傳遞多次。但是請記住,我們使用的是有限的數(shù)據(jù)集,并且我們使用一個迭代過程即梯度下降,優(yōu)化學習過程和圖示。因此僅僅更新權(quán)重一次或者說使用一個 epoch 是不夠的。
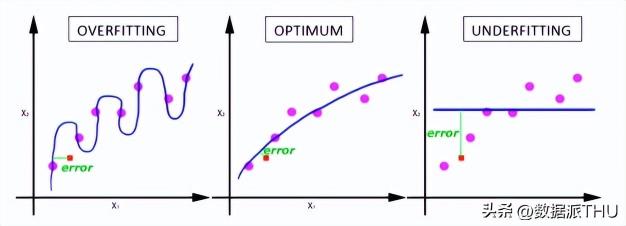
在神經(jīng)網(wǎng)絡(luò)中傳遞完整的數(shù)據(jù)集一次是不夠的,而且我們需要將隨著 epoch 數(shù)量增加,神經(jīng)網(wǎng)絡(luò)中的權(quán)重的更新次數(shù)也增加,曲線從欠擬合變得過擬合。那么,幾個 epoch 才是合適的呢?呵呵,這個問題并沒有確定的標準答案,需要開發(fā)者根據(jù)數(shù)據(jù)集的特性和個人經(jīng)驗來設(shè)置。
batch
在不能將數(shù)據(jù)一次性通過神經(jīng)網(wǎng)絡(luò)的時候,就需要將數(shù)據(jù)集分成幾個 batch。
迭代
迭代是 batch 需要完成一個 epoch 的次數(shù)。記住:在一個 epoch 中,batch 數(shù)和迭代數(shù)是相等的。
比如對于一個有 2000 個訓練樣本的數(shù)據(jù)集。將 2000 個樣本分成大小為 400 的 batch(5個batch),那么完成一個 epoch 需要 5次迭代。
4.3 損失函數(shù)
“損失”就是所有樣本的“誤差”的總和,亦即(mm 為樣本數(shù)):
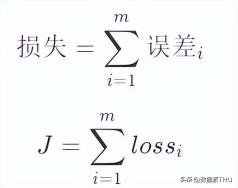
損失函數(shù)表達式
(1)0-1損失函數(shù)(2)絕對值損失函數(shù)(3)鉸鏈損失函數(shù)(4)對數(shù)損失函數(shù)(5)均方差損失函數(shù)(6)交叉熵損失函數(shù)
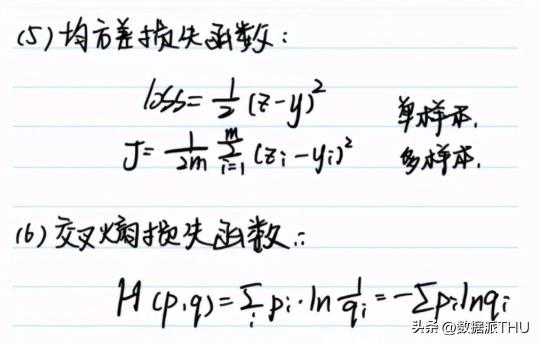
均方差和交叉熵表達式
4.4 優(yōu)化函數(shù)
實例中的第1.4節(jié),給創(chuàng)建的模型加入優(yōu)化器和損失函數(shù)
# 優(yōu)化器adam,線性回歸模型損失函數(shù)為均方差(mse)model.compile(optimizer="adam",loss="mse")這里使用的是adam優(yōu)化器,在神經(jīng)網(wǎng)絡(luò)中,優(yōu)化方法還有很多,這里選擇幾種做個簡單介紹,詳細信息還需要單獨去查找資料。
1)梯度下降法(Gradient Descent)
梯度下降法是最重要的一種方法,也是很多其他優(yōu)化算法的基礎(chǔ)。
2)隨機梯度下降法(Stochastic Gradient Descent)
每次只用一個樣本進行更新,計算量小,更新頻率高;容易導致模型超調(diào)不穩(wěn)定,收斂也不穩(wěn)定
3)Mini Batch Gradient Descent
mini batch 梯度下降法是梯度下降法和隨機梯度下降法的折衷,即在計算loss的時候,既不是直接計算整個數(shù)據(jù)集的loss,也不是只計算一個樣本的loss,而是計算一個batch的loss,batch的大小自己設(shè)定。
4)Momentum
帶momentum(動量)的梯度下降法也是一種很常用的的優(yōu)化算法。這種方法因為引入了momentum量,所以能夠?qū)μ荻认陆捣ㄆ鸬郊铀俚淖饔谩?/p>
5)Nesterov
NAG算法簡而言之,就是在進行Momentum梯度下降法之前,先做一個預演,看看沿著以前的方向進行更新是否合適,不合適就立馬調(diào)整方向。也就是說參數(shù)更新的方向不再是當前的梯度方向,而是參數(shù)未來所要去的真正方向。
6)Adagrad
在訓練過程中,每個不參數(shù)都有自己的學習率,并且這個學習率會根據(jù)自己以前的梯度平方和而進行衰減。
優(yōu)點:在訓練的過程中不用人為地調(diào)整學習率,一般設(shè)置好默認的初始學習率就行了;
缺點:隨著迭代的進行,公式(6)中的學習率部分會因為分母逐漸變大而變得越來越小,在訓練后期模型幾乎不再更新參數(shù)。
7)AdaDelta
AdaDelta是Adagrad的改進版,目的就是解決Adagrad在訓練的后期,學習率變得非常小,降低模型收斂速度。
8)Adam
這里重點介紹一下Adam。
前面我們從最經(jīng)典的梯度下降法開始,介紹了幾個改進版的梯度下降法。
Momentum方法通過添加動量,提高收斂速度;Nesterov方法在進行當前更新前,先進行一次預演,從而找到一個更加適合當前情況的梯度方向和幅度;Adagrad讓不同的參數(shù)擁有不同的學習率,并且通過引入梯度的平方和作為衰減項,而在訓練過程中自動降低學習率;AdaDelta則對Adagrad進行改進,讓模型在訓練后期也能夠有較為適合的學習率。既然不同的參數(shù)可以有不同的學習率,那么不同的參數(shù)是不是也可以有不同的Momentum呢?
Adam方法就是根據(jù)上述思想而提出的,對于每個參數(shù),其不僅僅有自己的學習率,還有自己的Momentum量,這樣在訓練的過程中,每個參數(shù)的更新都更加具有獨立性,提升了模型訓練速度和訓練的穩(wěn)定性。
Adam(Adaptive Moment Estimation):
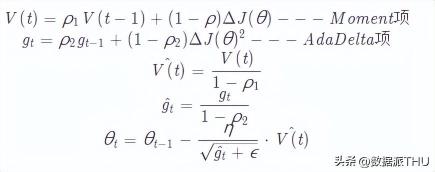
一般的,ρ 1 設(shè)置為0.9, ρ 2 設(shè)置為0.999
套用別人說過的一句話:Adam works well in practice and outperforms other Adaptive techniques.
事實上,如果你的數(shù)據(jù)比較稀疏,那么像SGD,NAG以及Momentum的方法往往會表現(xiàn)得比較差,這是因為對于模型中的不同參數(shù),他們均使用相同的學習率,這會導致那些應(yīng)該更新快的參數(shù)更新的慢,而應(yīng)該更新慢的有時候又會因為數(shù)據(jù)的原因的變得快。因此,對于稀疏的數(shù)據(jù)更應(yīng)該使用Adaptive方法(Adagrad、AdaDelta、Adam)。同樣,對于一些深度神經(jīng)網(wǎng)絡(luò)或者非常復雜的神經(jīng)網(wǎng)絡(luò),使用Adam或者其他的自適應(yīng)(Adaptive)的方法也能夠更快的收斂。
5 總結(jié)
回顧一下本文的主要內(nèi)容:
1)理解概念:人工神經(jīng)網(wǎng)絡(luò)靈感來自于生物神經(jīng)網(wǎng)絡(luò),它可以通過增加隱層神經(jīng)元的數(shù)量,按照任意給定的精度近似任何連續(xù)函數(shù)來提升模型近似的精度。
2)實例介紹了構(gòu)建人工神經(jīng)網(wǎng)絡(luò)模型的機器學習實現(xiàn)過程
3)人工神經(jīng)網(wǎng)絡(luò)的訓練過程
4)詳細介紹了神經(jīng)網(wǎng)絡(luò)相關(guān)的一些基本概念:反向傳播,梯度下降,損失函數(shù),優(yōu)化函數(shù),epoch,batch size ,優(yōu)化器,學習率等。
相關(guān)推薦



- 免責聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應(yīng)被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認可。 交易和投資涉及高風險,讀者在采取與本文內(nèi)容相關(guān)的任何行動之前,請務(wù)必進行充分的盡職調(diào)查。最終的決策應(yīng)該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產(chǎn)生的任何金錢損失負任何責任。
