

 新火種
2023-11-11
新火種
2023-11-11 



北大新成果:無(wú)需訓(xùn)練,機(jī)器人聽(tīng)指令就能靈活走位
要點(diǎn):
1. 北大研究團(tuán)隊(duì)開(kāi)發(fā)了一種具身導(dǎo)航系統(tǒng),使機(jī)器人可以根據(jù)口頭指令在室內(nèi)環(huán)境中移動(dòng),無(wú)需額外訓(xùn)練或建圖。
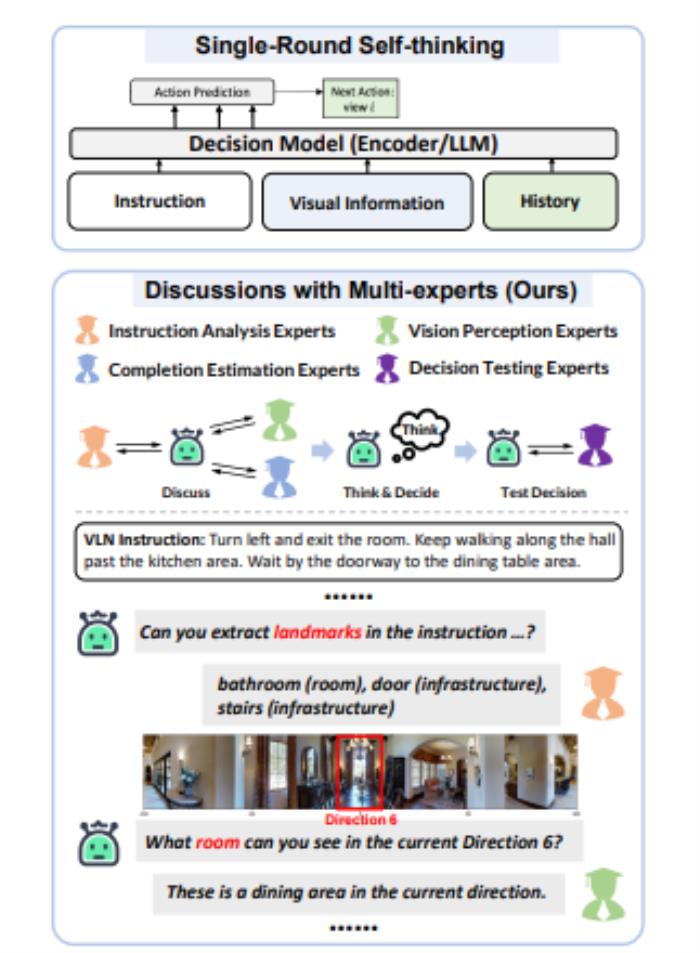
2. 這一系統(tǒng)涉及多個(gè)關(guān)鍵任務(wù),包括指令分析、視覺(jué)感知、完成估計(jì)和決策測(cè)試,由大模型專(zhuān)家團(tuán)隊(duì)協(xié)同完成。
3. DiscussNav系統(tǒng)通過(guò)與大模型專(zhuān)家互動(dòng),使機(jī)器人能夠根據(jù)人類(lèi)指令移動(dòng),解決了機(jī)器人導(dǎo)航訓(xùn)練數(shù)據(jù)稀缺的問(wèn)題,同時(shí)具備零樣本能力,能夠執(zhí)行多樣的導(dǎo)航指令。
站長(zhǎng)之家11月6日 消息:北大的研究團(tuán)隊(duì)近期推出了一項(xiàng)具身導(dǎo)航系統(tǒng),可使機(jī)器人無(wú)需額外訓(xùn)練或建圖,僅通過(guò)口頭指令在室內(nèi)環(huán)境中自如移動(dòng)。這一系統(tǒng)包括指令分析、視覺(jué)感知、完成估計(jì)和決策測(cè)試等多個(gè)關(guān)鍵任務(wù),需要不同領(lǐng)域的知識(shí),這些任務(wù)由一個(gè)大模型專(zhuān)家團(tuán)隊(duì)協(xié)同完成。
作者啟發(fā)于現(xiàn)實(shí)中專(zhuān)家討論行為,設(shè)計(jì)了DiscussNav導(dǎo)航系統(tǒng),通過(guò)賦予大語(yǔ)言模型(LLM)和多模態(tài)大模型(MLM)專(zhuān)家角色和任務(wù),構(gòu)建了具備不同專(zhuān)長(zhǎng)的視覺(jué)導(dǎo)航專(zhuān)家團(tuán)隊(duì)。
論文地址:https://arxiv.org/pdf/2309.11382.pdf
在這一系統(tǒng)中,導(dǎo)航機(jī)器人會(huì)在每一步移動(dòng)前主動(dòng)與專(zhuān)家討論,以理解人類(lèi)指令中所需的動(dòng)作和提及的物體標(biāo)志。然后,它會(huì)根據(jù)這些物體標(biāo)志類(lèi)型傾向性地感知周?chē)h(huán)境,估計(jì)指令的完成情況,并做出初步的移動(dòng)決策。
值得注意的是,在決策過(guò)程中,機(jī)器人會(huì)同時(shí)生成多個(gè)獨(dú)立的預(yù)測(cè)結(jié)果,并在這些結(jié)果之間出現(xiàn)不一致時(shí),向決策測(cè)試專(zhuān)家求助,以篩選出最終的移動(dòng)決策。這一方法不同于傳統(tǒng)方法,無(wú)需額外預(yù)訓(xùn)練,通過(guò)與大模型專(zhuān)家的互動(dòng),直接解決了機(jī)器人導(dǎo)航訓(xùn)練數(shù)據(jù)稀缺的問(wèn)題,并具備零樣本能力。
DiscussNav系統(tǒng)在經(jīng)典的視覺(jué)語(yǔ)言導(dǎo)航數(shù)據(jù)集Room2Room上的表現(xiàn)顯著超越了所有零樣本方法,甚至勝過(guò)了經(jīng)過(guò)訓(xùn)練的方法。
研究團(tuán)隊(duì)還在Turtlebot4移動(dòng)機(jī)器人上進(jìn)行了真實(shí)室內(nèi)場(chǎng)景導(dǎo)航實(shí)驗(yàn),結(jié)果表明,該系統(tǒng)在真實(shí)世界中的表現(xiàn)明顯優(yōu)于之前最優(yōu)的零樣本方法和經(jīng)過(guò)預(yù)訓(xùn)練微調(diào)的方法,展現(xiàn)出良好的從模擬環(huán)境到真實(shí)環(huán)境的遷移能力。
作者指出,這一系統(tǒng)具備四個(gè)強(qiáng)大的能力,包括識(shí)別開(kāi)放世界物體、識(shí)別細(xì)粒度的導(dǎo)航標(biāo)志物體、糾正其他專(zhuān)家在討論中的錯(cuò)誤信息,以及排除不一致的移動(dòng)決策。
此外,作者還提出,深入研究如何有效利用仿真數(shù)據(jù)和大模型從海量數(shù)據(jù)中學(xué)到的先驗(yàn)知識(shí)是未來(lái)具身智能研究的發(fā)展方向。盡管受到數(shù)據(jù)規(guī)模和真實(shí)環(huán)境探索成本的限制,但大模型的進(jìn)展為具身智能提供了新方向,將推動(dòng)其發(fā)展。
在總體上,北大的DiscussNav系統(tǒng)代表了具身導(dǎo)航領(lǐng)域的一項(xiàng)重要突破,使機(jī)器人能夠根據(jù)口頭指令自如導(dǎo)航,同時(shí)具備零樣本能力,這對(duì)未來(lái)的智能機(jī)器人和自動(dòng)化應(yīng)用具有重要意義。
相關(guān)推薦




- 免責(zé)聲明
- 本文所包含的觀點(diǎn)僅代表作者個(gè)人看法,不代表新火種的觀點(diǎn)。在新火種上獲取的所有信息均不應(yīng)被視為投資建議。新火種對(duì)本文可能提及或鏈接的任何項(xiàng)目不表示認(rèn)可。 交易和投資涉及高風(fēng)險(xiǎn),讀者在采取與本文內(nèi)容相關(guān)的任何行動(dòng)之前,請(qǐng)務(wù)必進(jìn)行充分的盡職調(diào)查。最終的決策應(yīng)該基于您自己的獨(dú)立判斷。新火種不對(duì)因依賴(lài)本文觀點(diǎn)而產(chǎn)生的任何金錢(qián)損失負(fù)任何責(zé)任。
