

 新火種
2023-11-05
新火種
2023-11-05 


CMU清華MIT引爆全球首個(gè)Agent無限流,機(jī)器人「007」加班自學(xué)停不下來!具身智能被革命
文章來源:新智元
編輯:Aeneas 好困
 最近,由CMU/MIT/清華/Umass提出的全球首個(gè)生成式機(jī)器人智能體RoboGen,可以無限生成數(shù)據(jù),讓機(jī)器人7*24小時(shí)永不停歇地訓(xùn)練。AIGC for Robotics,果然是未來的方向。
最近,由CMU/MIT/清華/Umass提出的全球首個(gè)生成式機(jī)器人智能體RoboGen,可以無限生成數(shù)據(jù),讓機(jī)器人7*24小時(shí)永不停歇地訓(xùn)練。AIGC for Robotics,果然是未來的方向。全球首個(gè)生成式機(jī)器人Agent發(fā)布了!
長(zhǎng)久以來,相比于語言或者視覺模型可以在大規(guī)模的互聯(lián)網(wǎng)數(shù)據(jù)上訓(xùn)練,訓(xùn)練機(jī)器人的策略模型需要帶有動(dòng)態(tài)物理交互信息的數(shù)據(jù),而這些數(shù)據(jù)的匱乏一直是具身智能發(fā)展的最大瓶頸。
最近,來自CMU、清華、MIT,UMass等機(jī)構(gòu)的研究人員提出了一種全新的RoboGen智能體。
利用涵蓋在大語言模型和生成式模型中蘊(yùn)含的大規(guī)模知識(shí),配以逼真模擬世界提供的物理信息,可以「無限」生成各種任務(wù)、場(chǎng)景以及教學(xué)數(shù)據(jù),實(shí)現(xiàn)機(jī)器人7x24小時(shí)全自動(dòng)訓(xùn)練。
現(xiàn)在,我們正在迅速耗盡來自網(wǎng)絡(luò)的高質(zhì)量的真實(shí)token。全球訓(xùn)練AI的數(shù)據(jù),都快不夠用了。
深度學(xué)習(xí)之父Hinton表示,「科技公司們正在未來18個(gè)月內(nèi),要使用比現(xiàn)在GPT-4多100倍的算力訓(xùn)練新模型」。模型參數(shù)更大,算力需求巨大,然而數(shù)據(jù)在哪里?
面對(duì)饑渴的模型,AI合成就是答案。
論文地址:https://arxiv.org/abs/2311.01455
項(xiàng)目主頁:https://robogen-ai.github.io/
開源地址:https://github.com/Genesis-Embodied-AI
具體來說,由MIT-IBM首席科學(xué)家淦創(chuàng)帶領(lǐng)的研究團(tuán)隊(duì),在生成式AI和和可微分物理模擬的加持下,提出了一種「提出-生成-學(xué)習(xí)」循環(huán),讓Agent能夠自己出題自己訓(xùn)練機(jī)器人。
首先,Agent提出,我們要開發(fā)這個(gè)技能。
然后,它會(huì)生成相應(yīng)的環(huán)境、配置和技能學(xué)習(xí)指導(dǎo),來創(chuàng)建模擬環(huán)境。
最后,Agent會(huì)將提出的上層任務(wù)分解為子任務(wù),選擇最佳學(xué)習(xí)方法,然后學(xué)習(xí)策略、掌握所提技能。
值得注意的是,整個(gè)過程幾乎都不需要人類的監(jiān)督,而且任務(wù)的數(shù)量,竟然是——無限個(gè)!
對(duì)于這則重磅的研究,英偉達(dá)高級(jí)科學(xué)家Jim Fan也進(jìn)行了轉(zhuǎn)發(fā)。

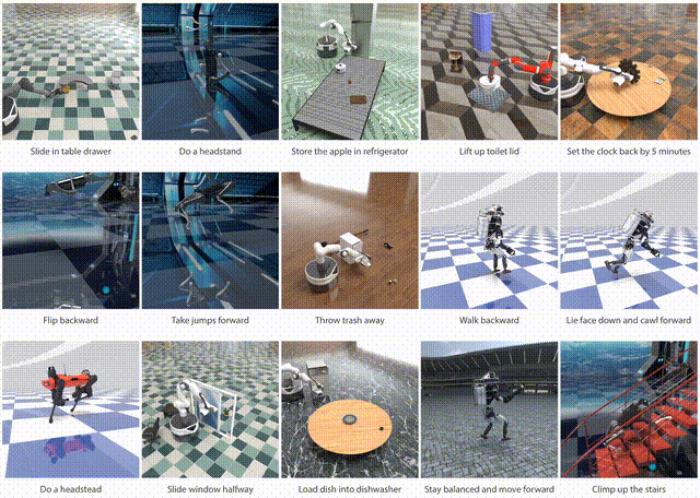
現(xiàn)在,機(jī)器人已經(jīng)學(xué)會(huì)一系列炸裂操作——
把物品放到儲(chǔ)物柜中:

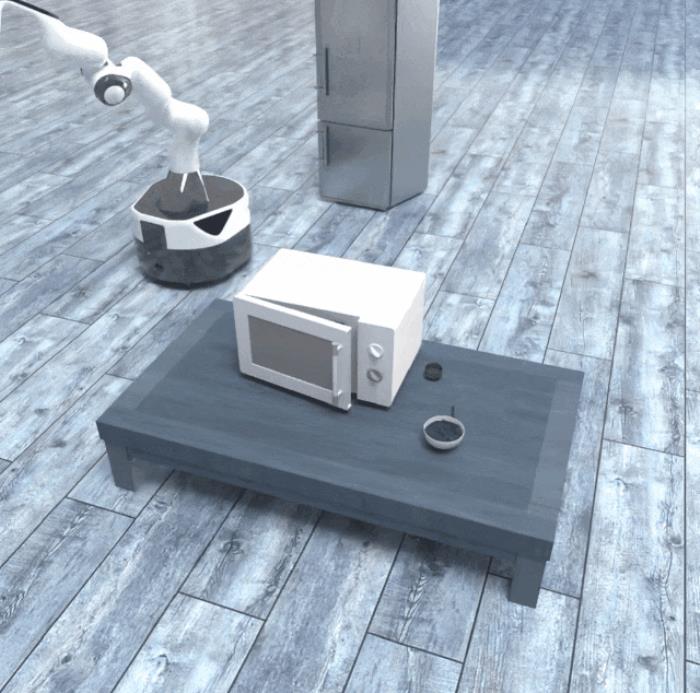
用微波爐加熱一碗湯:
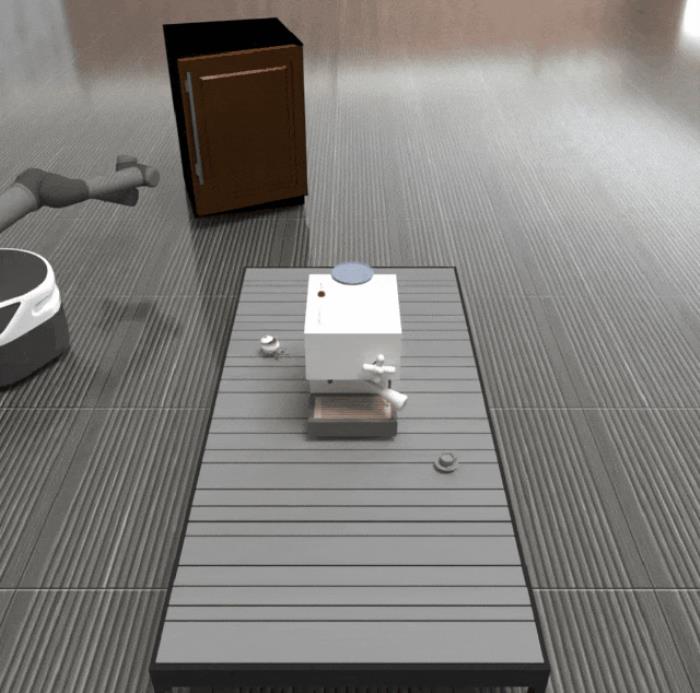
拉動(dòng)杠桿沖泡咖啡:
以及后空翻等等:

模擬環(huán)境,多樣化技能學(xué)習(xí)的關(guān)鍵
機(jī)器人研究中,長(zhǎng)期存在這樣一個(gè)難題:怎樣賦予機(jī)器人多種技能,讓它們?cè)诜枪S環(huán)境中操作,為人類執(zhí)行廣泛的任務(wù)?
近年來,我們教會(huì)了機(jī)器人各種復(fù)雜的技能,比如流體操縱、投擲物體、踢足球、跑酷等等,然而這些技能卻各自為政,視野較短,需要人工設(shè)計(jì)的任務(wù)描述和訓(xùn)練監(jiān)督。
因?yàn)楝F(xiàn)實(shí)世界數(shù)據(jù)收集成本高昂且費(fèi)力,這些技能都是在適當(dāng)領(lǐng)域隨機(jī)化的模擬中訓(xùn)練,然后部署到現(xiàn)實(shí)世界中的。
與現(xiàn)實(shí)世界中的探索和數(shù)據(jù)收集相比,模擬環(huán)境具有許多優(yōu)點(diǎn),比如提供了低級(jí)狀態(tài)的特權(quán)訪問和無限的探索機(jī)會(huì);支持大規(guī)模并行計(jì)算,數(shù)據(jù)收集速度顯著加快;允許機(jī)器人開發(fā)閉環(huán)策略和錯(cuò)誤恢復(fù)能力。
然而,構(gòu)建模擬環(huán)境需要一系列繁瑣的任務(wù)(設(shè)計(jì)任務(wù)、選擇相關(guān)且語義上有意義的資產(chǎn)、生成合理的場(chǎng)景布局和配置、制定獎(jiǎng)勵(lì)或損失函數(shù)等訓(xùn)練監(jiān)督)。即使在模擬世界中,也極大限制了機(jī)器人技能學(xué)習(xí)的可擴(kuò)展性。
因此,研究者提出一種「生成模擬」范式,將模擬機(jī)器人技能學(xué)習(xí)的進(jìn)步與基礎(chǔ)和生成模型的最新進(jìn)展結(jié)合起來。
利用最先進(jìn)的基礎(chǔ)模型的生成能力,生成模擬可以為模擬中各種機(jī)器人技能學(xué)習(xí)所需的所有階段生成信息。
得益于最新基礎(chǔ)模型中全面的編碼知識(shí),以這種方式生成的場(chǎng)景和任務(wù)數(shù)據(jù),可能與現(xiàn)實(shí)世界場(chǎng)景的分布非常相似。
此外,這些模型可以進(jìn)一步提供分解的低級(jí)子任務(wù),這些子任務(wù)可以通過特定領(lǐng)域的策略學(xué)習(xí)方法無縫處理,從而產(chǎn)生各種技能和場(chǎng)景的閉環(huán)演示。
RoboGen流程
RoboGen是一種全自動(dòng)流程,可以7x24h地讓機(jī)器人學(xué)習(xí)各種技能,其中包括4個(gè)階段:
1. 任務(wù)建議;
2. 場(chǎng)景生成;
3. 訓(xùn)練監(jiān)督生成;
4. 利用生成的信息進(jìn)行技能學(xué)習(xí)。
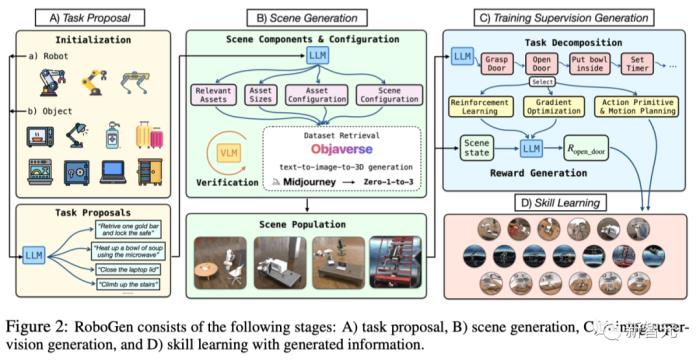
利用最新基礎(chǔ)模型的嵌入式常識(shí)和生成功能,RoboGen可以自動(dòng)生成任務(wù)、場(chǎng)景和訓(xùn)練監(jiān)督,從而讓機(jī)器人的多種技能學(xué)習(xí)實(shí)現(xiàn)規(guī)模化。
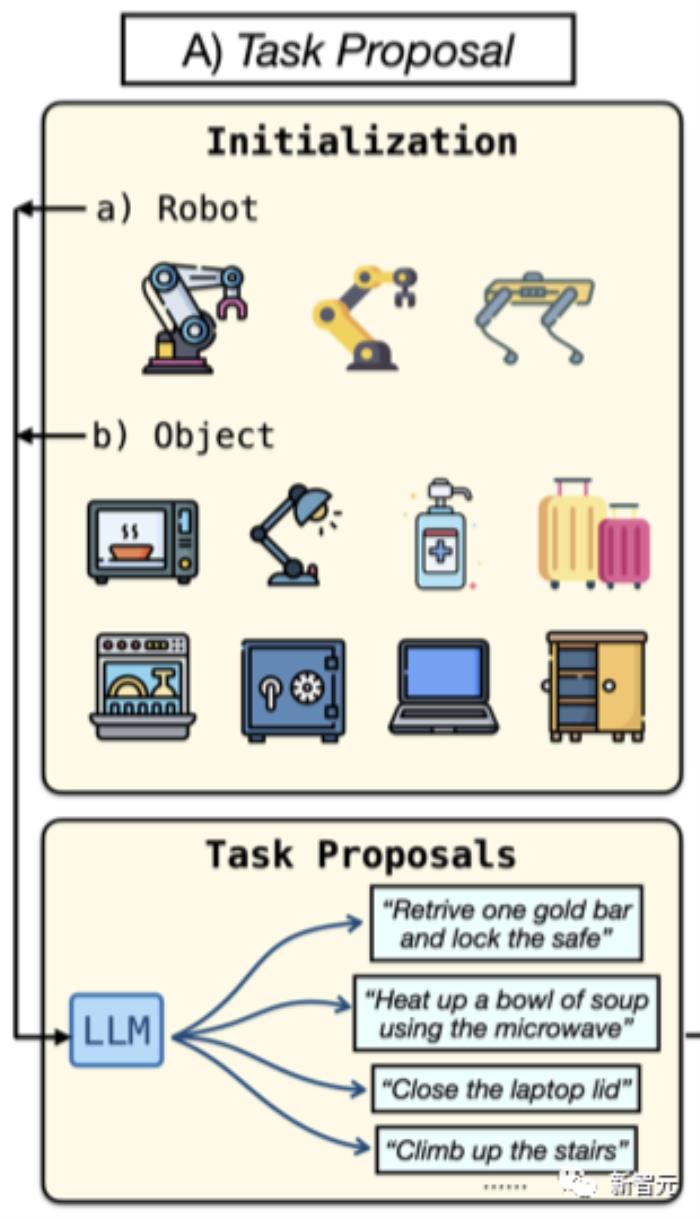
任務(wù)建議
在這一階段,RoboGen能夠提出上層任務(wù),生成相應(yīng)的環(huán)境,將上層目標(biāo)分解為底層子任務(wù),然后按順序?qū)W習(xí)子技能。
首先,RoboGen會(huì)生成有意義的、多樣化的、高水平的任務(wù),供機(jī)器人學(xué)習(xí)。
研究者使用特定的機(jī)器人類型和從池中隨機(jī)采樣的對(duì)象,來初始化系統(tǒng)。然后將提供的機(jī)器人和采樣對(duì)象信息輸入LLM。
這種采樣過程,就確保了生成任務(wù)的多樣性。
比如,四足機(jī)器人等腿式機(jī)器人能夠獲得多種運(yùn)動(dòng)技能,而機(jī)械臂操縱器在配對(duì)時(shí),有可能執(zhí)行多種操縱任務(wù)與不同的采樣對(duì)象。
研究者使用GPT-4在當(dāng)前的流程中進(jìn)行查詢。隨后在機(jī)械的背景下解釋 RoboGen的詳細(xì)信息,以及與對(duì)象操作相關(guān)的任務(wù)。
用于初始化的對(duì)象是從預(yù)定義的列表中采樣的,包括家庭場(chǎng)景中常見的鉸接式和非鉸接式對(duì)象,例如烤箱、微波爐、飲水機(jī)、筆記本電腦、洗碗機(jī)等。
因?yàn)镚PT-4接受過大量互聯(lián)網(wǎng)數(shù)據(jù)集的培訓(xùn),所以它對(duì)這些對(duì)象的可供性、如何與它們交互、它們可以與哪些有意義的任務(wù)相關(guān)聯(lián),都有著豐富的理解。
比如,假設(shè)采樣的鉸接物體是微波爐,其中關(guān)節(jié)0是連接門的旋轉(zhuǎn)關(guān)節(jié),關(guān)節(jié)1是控制計(jì)時(shí)器旋鈕的另一個(gè)旋轉(zhuǎn)關(guān)節(jié),GPT-4會(huì)返回一個(gè)任務(wù)——「機(jī)器人手臂將一碗湯放入微波爐內(nèi),關(guān)上門并設(shè)置微波爐計(jì)時(shí)器,適當(dāng)加熱時(shí)間a」。
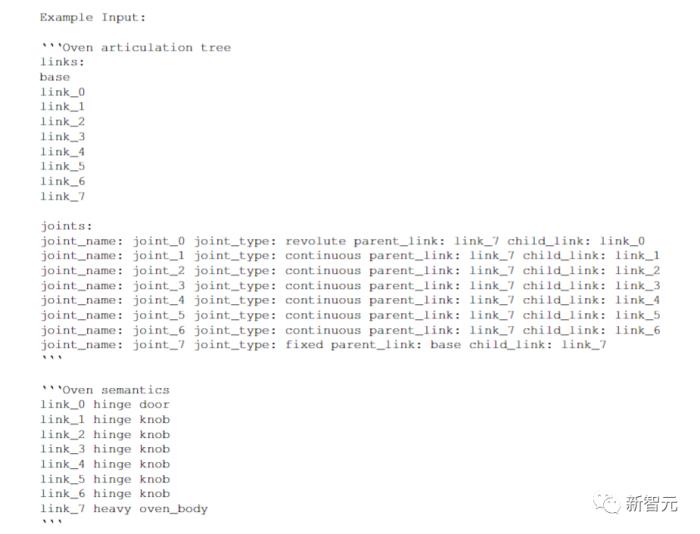
生成的任務(wù)所需的其他對(duì)象,有一碗湯a,以及與任務(wù)相關(guān)的關(guān)節(jié)和鏈接,包括關(guān)節(jié)0(用于打開微波爐門)、關(guān)節(jié)1(用于設(shè)置定時(shí)器)、鏈接0(門)和鏈接1(定時(shí)器旋鈕)。
對(duì)于鉸接物體,由于PartNetMobility是唯一高質(zhì)量的鉸接物體數(shù)據(jù)集,并且已經(jīng)涵蓋了各種鉸接資產(chǎn),因此將根據(jù)采樣資產(chǎn)生成任務(wù)。
通過重復(fù)查詢不同的采樣對(duì)象和示例,可以生成各種操作和運(yùn)動(dòng)任務(wù)。
場(chǎng)景生成
給定一個(gè)任務(wù),就可以繼續(xù)生成相應(yīng)的模擬場(chǎng)景,以學(xué)習(xí)完成該任務(wù)的技能。
如圖所示,根據(jù)任務(wù)描述生成場(chǎng)景組件和配置,并檢索或生成對(duì)象資產(chǎn),隨后填充模擬場(chǎng)景。
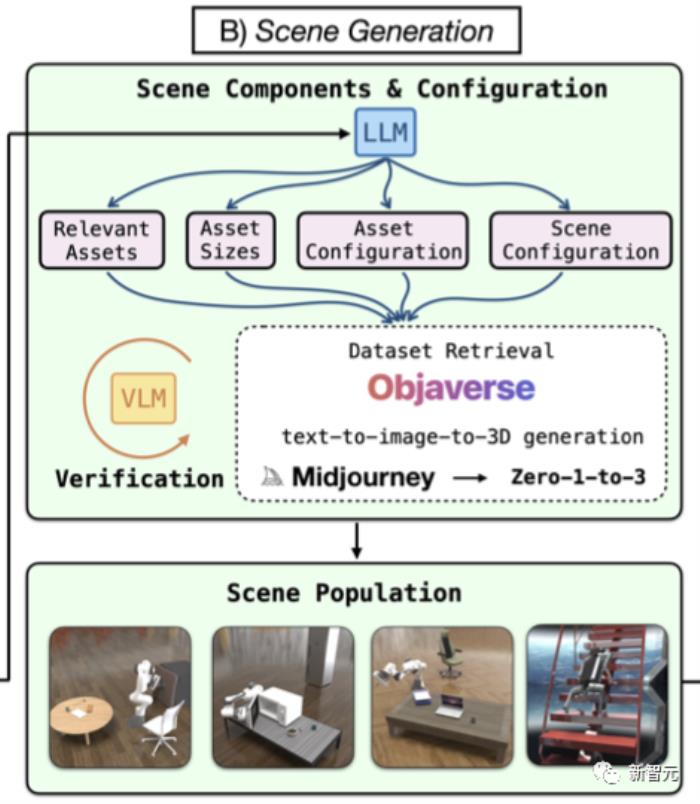
場(chǎng)景組件和配置由以下元素組成: 對(duì)要填充到場(chǎng)景中的相關(guān)資產(chǎn)的查詢、其物理參數(shù)(例如大小)、配置 (例如初始關(guān)節(jié)角度) 以及資產(chǎn)的整體空間配置。
除了上一步中生成的任務(wù)所需的必要對(duì)象資產(chǎn)之外,為了增加生成場(chǎng)景的復(fù)雜性和多樣性,同時(shí)類似于真實(shí)場(chǎng)景的對(duì)象分布,研究者還讓GPT-4返回與任務(wù)語義相關(guān)對(duì)象的附加查詢。
比如,對(duì)于任務(wù)「打開柜子,將玩具放入其中,然后關(guān)上它」,生成的場(chǎng)景還會(huì)包括客廳墊子、臺(tái)燈、一本書和一把辦公椅。
訓(xùn)練監(jiān)督生成
為了獲得相關(guān)技能,就需要對(duì)技能學(xué)習(xí)進(jìn)行監(jiān)督。
RoboGen會(huì)首先查詢GPT-4,來把長(zhǎng)任務(wù)規(guī)劃和分解為較短范圍的子任務(wù)。
一個(gè)關(guān)鍵假設(shè)是,當(dāng)任務(wù)被分解為足夠短的子任務(wù)時(shí),每個(gè)子任務(wù)都可以通過強(qiáng)化學(xué)習(xí)、運(yùn)動(dòng)規(guī)劃、軌跡優(yōu)化等現(xiàn)有算法可靠地解決。
分解后,RoboGen會(huì)查詢GPT-4,選擇合適的算法來解決每個(gè)子任務(wù)。
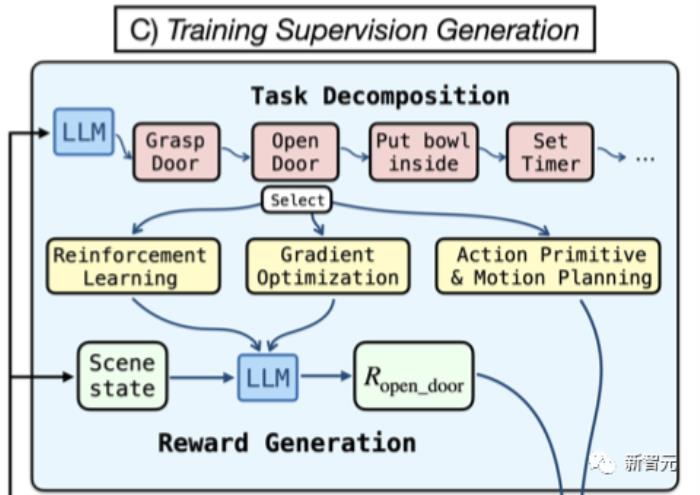
RoboGen中集成了幾種不同類型的學(xué)習(xí)算法: 強(qiáng)化學(xué)習(xí)、進(jìn)化策略、基于梯度的軌跡優(yōu)化、帶有運(yùn)動(dòng)規(guī)劃的動(dòng)作初始化。
每一種都適合不同的任務(wù),例如基于梯度的軌跡優(yōu)化更適合學(xué)習(xí)涉及軟體的細(xì)粒度操作任務(wù),比如將面團(tuán)塑造成目標(biāo)形狀。
與運(yùn)動(dòng)規(guī)劃相結(jié)合的動(dòng)作初始化在解決任務(wù)時(shí)更加可靠,例如通過無碰撞路徑接近目標(biāo)對(duì)象。
強(qiáng)化學(xué)習(xí)和進(jìn)化策略更適合接觸豐富、涉及與其他場(chǎng)景組件持續(xù)交互的任務(wù),例如腿部運(yùn)動(dòng),或者當(dāng)所需的動(dòng)作不能簡(jiǎn)單地通過離散的末端執(zhí)行器姿勢(shì)參數(shù)化時(shí),比如轉(zhuǎn)動(dòng)一個(gè)烤箱的旋鈕。
總之,GPT-4會(huì)根據(jù)生成的子任務(wù),在線選擇使用哪種算法。
接下來,就可以為機(jī)器人構(gòu)建模擬場(chǎng)景,讓它們學(xué)習(xí)技能了。
機(jī)器人學(xué)會(huì)開保險(xiǎn)箱
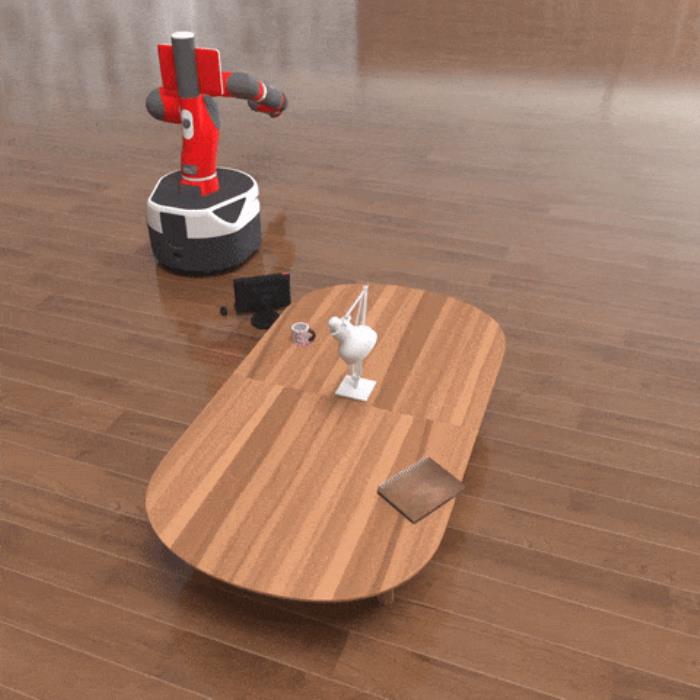
舉個(gè)例子,RoboGen會(huì)讓機(jī)器人去學(xué)習(xí)調(diào)整臺(tái)燈方向這種非常精巧的任務(wù)。
有趣的是,在這個(gè)場(chǎng)景里,地面上竟然還放著像是電腦顯示器這樣的易碎物。
可以說,非常考驗(yàn)機(jī)器人的環(huán)境識(shí)別能力了。
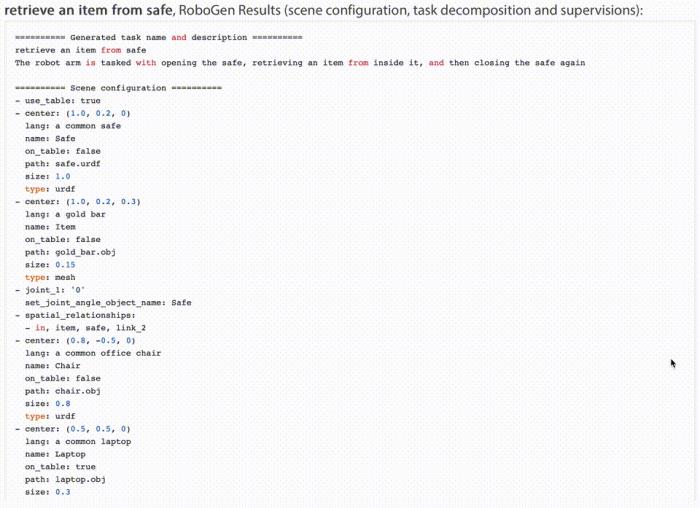
對(duì)此,RoboGen會(huì)生成非常詳盡的操作代碼,包括場(chǎng)景配置、任務(wù)分解和監(jiān)督:
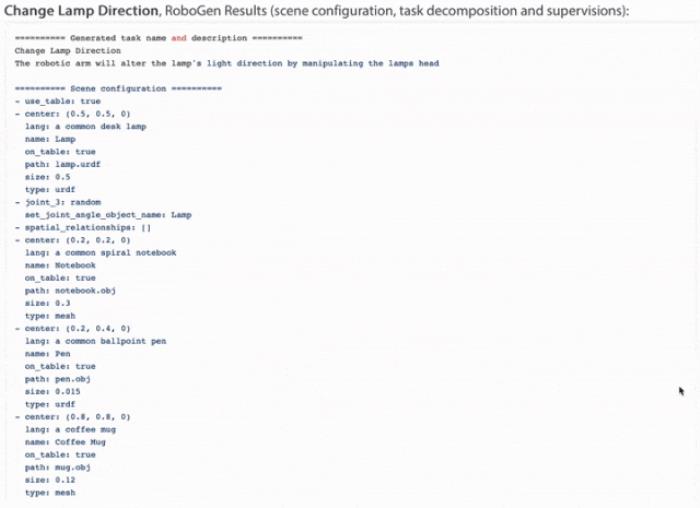
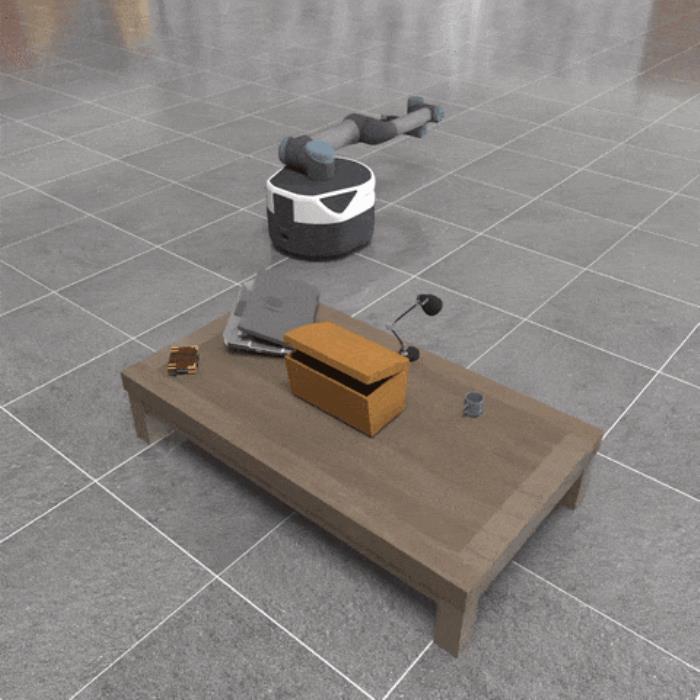
此外,還會(huì)訓(xùn)練一些需要執(zhí)行很多步驟才能完成的任務(wù),比如讓機(jī)器人把保險(xiǎn)箱里的東西取出來。
這里就涉及到開門,取物,放下,關(guān)門等操作,期間還需要盡量避免與家具產(chǎn)生碰撞。
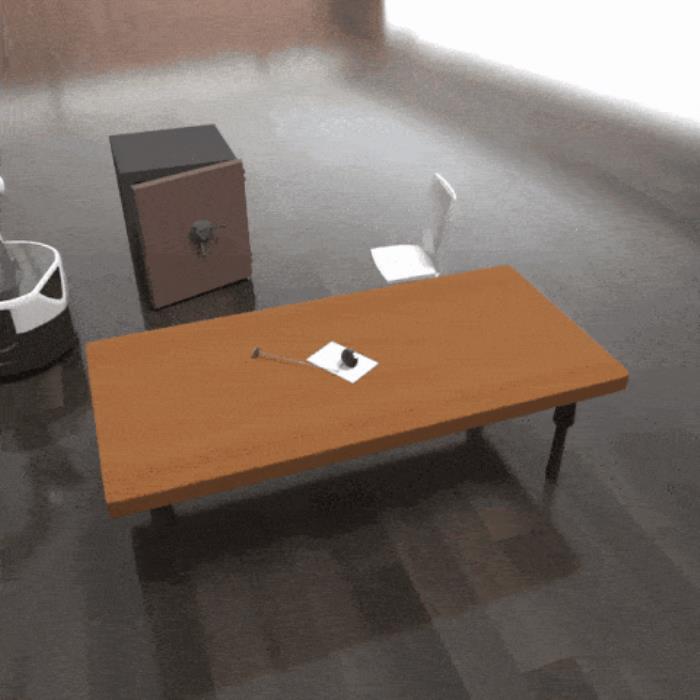
RoboGen給出的代碼如下:
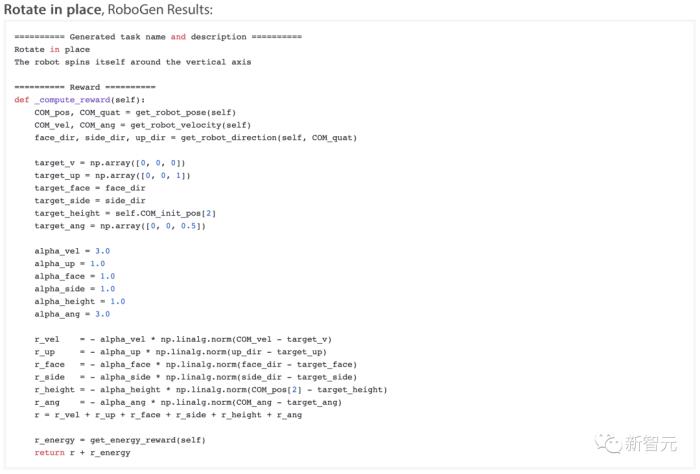
或者,諸如讓波士頓動(dòng)力的人形機(jī)器人原地轉(zhuǎn)個(gè)圈,這種在狹小空間中可能會(huì)遇到情景。

代碼如下:
實(shí)驗(yàn)結(jié)果
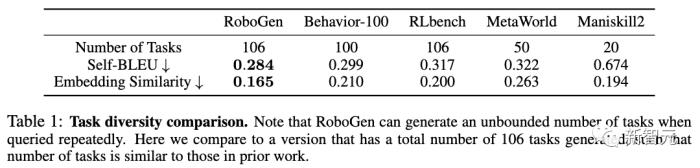
- 任務(wù)多樣性
如表1所示,與之前的所有基準(zhǔn)相比,RoboGen實(shí)現(xiàn)了最低的Self-BLEU和嵌入相似度。也就是說,RoboGen生成任務(wù)的多樣性,比人工制作的技能學(xué)習(xí)基準(zhǔn)和數(shù)據(jù)集還要高!
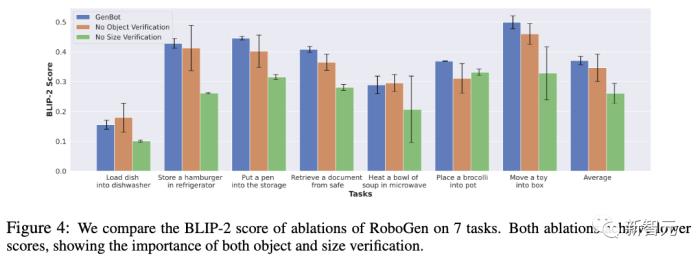
- 場(chǎng)景有效性
如圖4所示,取消大小驗(yàn)證會(huì)導(dǎo)致BLIP-2分?jǐn)?shù)急劇下降,這是因?yàn)镺bjaverse和PartNetMobility中的物體尺寸,與現(xiàn)實(shí)世界的實(shí)際尺寸之間存在著巨大差異。此外,沒有對(duì)象驗(yàn)證的BLIP-2得分也較低,而且方差更大。
相比之下,RoboGen中的驗(yàn)證步驟,可以顯著提高對(duì)象選擇的有效性。
- 訓(xùn)練指導(dǎo)有效性
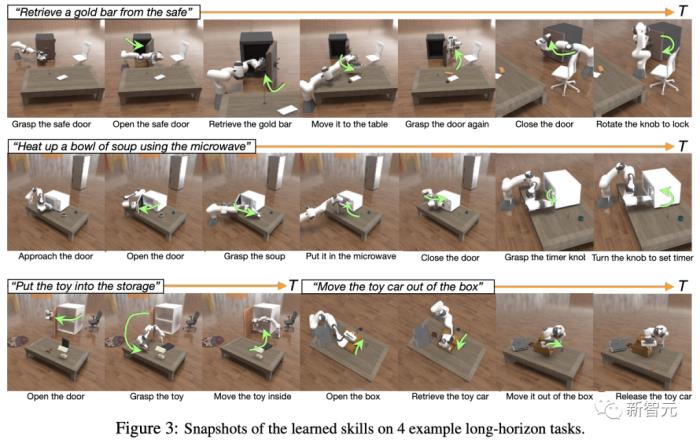
如圖3所示,機(jī)器人在4個(gè)長(zhǎng)程任務(wù)中,基于RoboGen生成的訓(xùn)練指導(dǎo)(即任務(wù)分解和獎(jiǎng)勵(lì)函數(shù))學(xué)習(xí)到的技能。
結(jié)果表明,機(jī)器人成功學(xué)習(xí)到了完成相應(yīng)任務(wù)的技能。也就是說,自動(dòng)生成的訓(xùn)練指導(dǎo)能有效衍生出有意義且有用的技能。
- 技能學(xué)習(xí)
表2的結(jié)果顯示,允許選擇學(xué)習(xí)算法有利于提高完成任務(wù)的性能。如果只使用RL,大多數(shù)任務(wù)的技能學(xué)習(xí)都會(huì)失敗。

- 系統(tǒng)
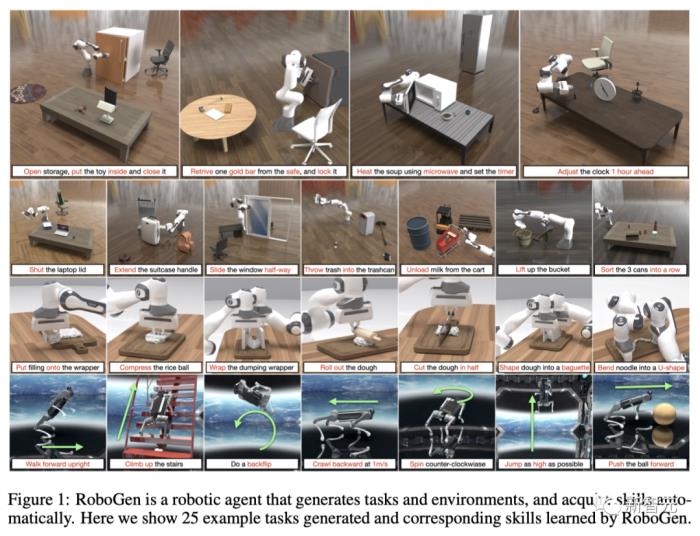
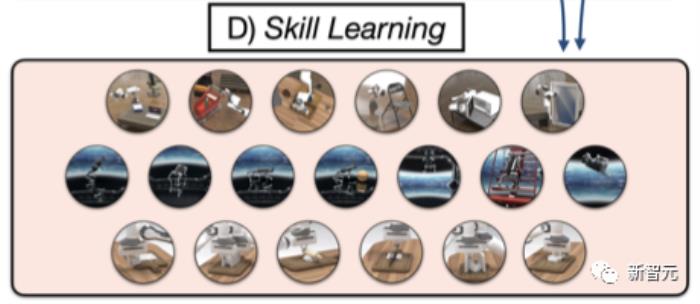
如圖1所示,RoboGen可以生成各種任務(wù),用于技能學(xué)習(xí),包括剛性/關(guān)節(jié)物體操作、運(yùn)動(dòng)和軟體操作。
而圖3進(jìn)一步表明,RoboGen能夠以合理的分解方式提供長(zhǎng)程操作技能。
作者介紹

Yufei Wang是卡內(nèi)基梅隆大學(xué)機(jī)器人研究所三年級(jí)的博士生,導(dǎo)師是Zackory Erickson教授和David Held教授,研究興趣是機(jī)器人學(xué)習(xí)。
此前,他于2020年12月在CMU獲得了計(jì)算機(jī)科學(xué)碩士學(xué)位,導(dǎo)師是David Held教授,于2019年7月在北京大學(xué)元培學(xué)院獲得了數(shù)據(jù)科學(xué)學(xué)士學(xué)位,導(dǎo)師是Bin Dong教授。

Zhou Xian是卡內(nèi)基梅隆大學(xué)機(jī)器人研究所的一名博士生,導(dǎo)師是Katerina Fragkiadaki。研究興趣是機(jī)器人、計(jì)算機(jī)視覺和世界模型學(xué)習(xí)。
在進(jìn)入CMU之前,他在新加坡南洋理工大學(xué)完成了學(xué)士學(xué)位,師從Pham Quang Cuong和I-Ming Chen。并曾在Meta AI、Akshara Rai,以及MIT-IBM AI Lab實(shí)習(xí),導(dǎo)師是Chuang Gan。
目前,他的研究重點(diǎn)是為可擴(kuò)展的機(jī)器人學(xué)習(xí)構(gòu)建統(tǒng)一的神經(jīng)策略和仿真基礎(chǔ)設(shè)施。
此外,共同一作還有清華姚班的陳楓。

團(tuán)隊(duì)負(fù)責(zé)人淦創(chuàng),現(xiàn)任IBM首席科學(xué)家和麻省大學(xué)助理教授,是姚期智院士的弟子。在博士期間曾獲得清華特獎(jiǎng),微軟學(xué)者,百度學(xué)者。他的研究同時(shí)得到了Amazon Research Award,Sony Faculty Award,Cisco Faculty Award,Microsoft Accelerate Foundation Models Research Program等資助。
參考資料:
https://robogen-ai.github.io
相關(guān)推薦




- 免責(zé)聲明
- 本文所包含的觀點(diǎn)僅代表作者個(gè)人看法,不代表新火種的觀點(diǎn)。在新火種上獲取的所有信息均不應(yīng)被視為投資建議。新火種對(duì)本文可能提及或鏈接的任何項(xiàng)目不表示認(rèn)可。 交易和投資涉及高風(fēng)險(xiǎn),讀者在采取與本文內(nèi)容相關(guān)的任何行動(dòng)之前,請(qǐng)務(wù)必進(jìn)行充分的盡職調(diào)查。最終的決策應(yīng)該基于您自己的獨(dú)立判斷。新火種不對(duì)因依賴本文觀點(diǎn)而產(chǎn)生的任何金錢損失負(fù)任何責(zé)任。
