

 新火種
2023-09-13
新火種
2023-09-13 


攀爬、跳躍、過窄縫,開源強化學習策略讓機器狗能跑酷了
機器之心報道
編輯:小舟
主打一個迅速。
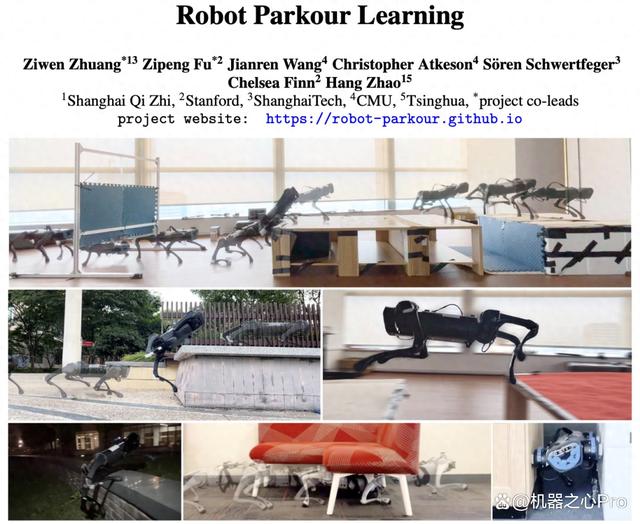
跑酷是一項極限運動,對機器人特別是四足機器狗來說,更是一項巨大的挑戰,需要在復雜的環境中快速克服各種障礙。一些研究嘗試使用參考動物數據或復雜的獎勵,但這些方法生成的「跑酷」技能要么多樣但盲目,要么基于視覺但特定于場景。然而,自主跑酷需要機器人學習基于視覺且多樣化的通用技能,以感知各種場景并迅速做出反應。
最近,一個機器狗跑酷的視頻火了,視頻中的機器狗在多種場景中迅速克服了各種障礙。例如,從鐵板下方的縫隙穿過,爬上木箱,再跳到另一個木箱上,一連串動作行云流水:
這串動作說明機器狗掌握了貼地爬行、攀爬和跳躍三個基本技能:

它還有個技能:傾斜擠過窄縫:
如果機器狗未能克服障礙,它會多試幾次:

該機器狗是基于一種為低成本機器人研發的「跑酷」技能學習框架。這個框架是由來自上海期智研究院、斯坦福大學、上海科技大學、CMU 和清華大學的研究者聯合提出的,研究論文已經入選 CoRL 2023(Oral)。研究項目已開源。
方法簡介
該研究推出了一種新的開源系統,用于學習基于視覺的端到端跑酷策略,以使用簡單的獎勵來學習多種跑酷技能,而無需任何參考運動數據。
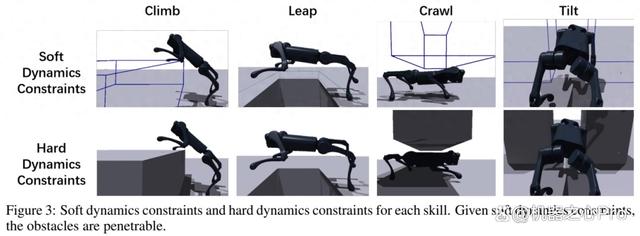
具體來說,該研究提出了一種強化學習方法,旨在讓機器人掌握攀爬高障礙、跳過大間隙、在低障礙下爬行、擠過狹小縫隙和跑步,并將這些技能蒸餾成基于單一視覺的跑酷策略,并以自我為中心的(egocentric)深度相機將其遷移到四足機器人上。
為了成功在低成本機器人上部署,該研究提出的跑酷策略僅使用機載計算(Nvidia Jetson)、機載深度攝像頭(Intel Realsense)和機載電源來部署,不使用動作捕捉、激光雷達、多個深度攝像頭和大量計算。
為了訓練跑酷策略,該研究共進行了如下三個階段的工作:
第一階段:具有 soft 動態約束(dynamics constraint)的強化學習預訓練。該研究使用自動課程讓機器人學習穿越障礙物,鼓勵機器人逐漸學會克服障礙。
第二階段:具有 hard 動態約束的強化學習微調。該研究在這個階段強制執行所有動態約束,并用現實動態(realistic dynamics)微調機器人在預訓練階段學到的行為。
第三階段:蒸餾。在學習了每個單獨的跑酷技能后,該研究使用 DAgger 將它們蒸餾成一個基于視覺的跑酷策略(由 RNN 參數化),該策略可以僅使用機載感知和計算部署到腿式機器人上。

實驗及結果
在訓練中,該研究為每種技能設置了相應的障礙物尺寸,如下表 1 所示:
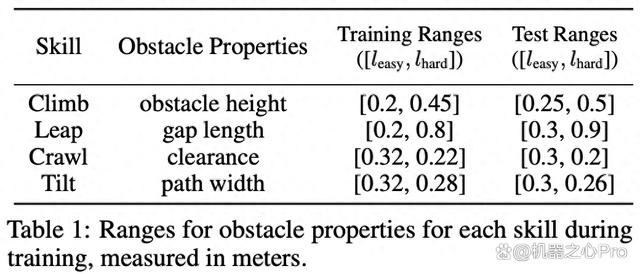
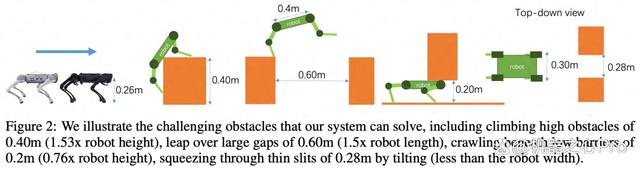
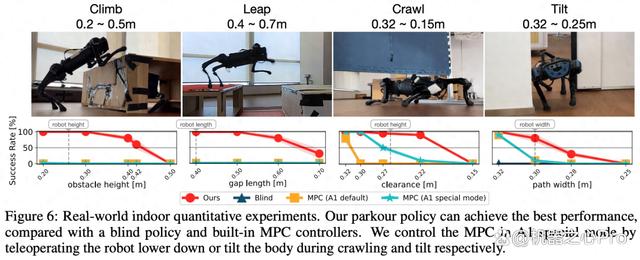
該研究進行了大量的模擬和現實實驗,結果表明,跑酷策略使低成本四足機器人能夠自主選擇和執行適當的跑酷技能,僅使用機載計算、機載視覺傳感和機載電源即可穿越開放世界中具有挑戰性的環境,包括爬高 0.40m(1.53x 機器人高度)的障礙物,跳過 0.60m(1.5x 機器人長度)的大間隙,在 0.2m(0.76x 機器人高度)的低障礙物下爬行,通過傾斜擠過 0.28m 的細縫(小于機器人寬度),并且可以一直跑步前行。
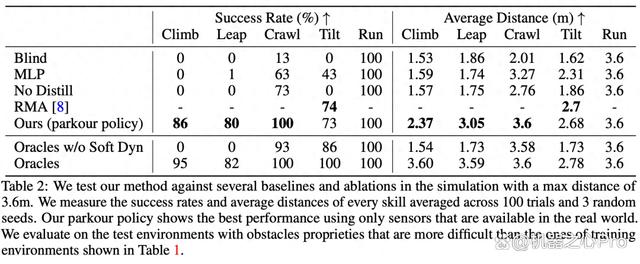
此外,該研究還將所提方法和幾種基線方法進行了比較,并在模擬環境中進行了消融實驗,結果如下表 2 所示:
感興趣的讀者可以閱讀論文原文,了解更多研究內容。
相關推薦




- 免責聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認可。 交易和投資涉及高風險,讀者在采取與本文內容相關的任何行動之前,請務必進行充分的盡職調查。最終的決策應該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產生的任何金錢損失負任何責任。
