

 新火種
2025-02-27
新火種
2025-02-27 



轉手絹、扭秧歌,春晚機器人由上海大學校友打造

本文圖均為 上海大學微信公眾號 圖
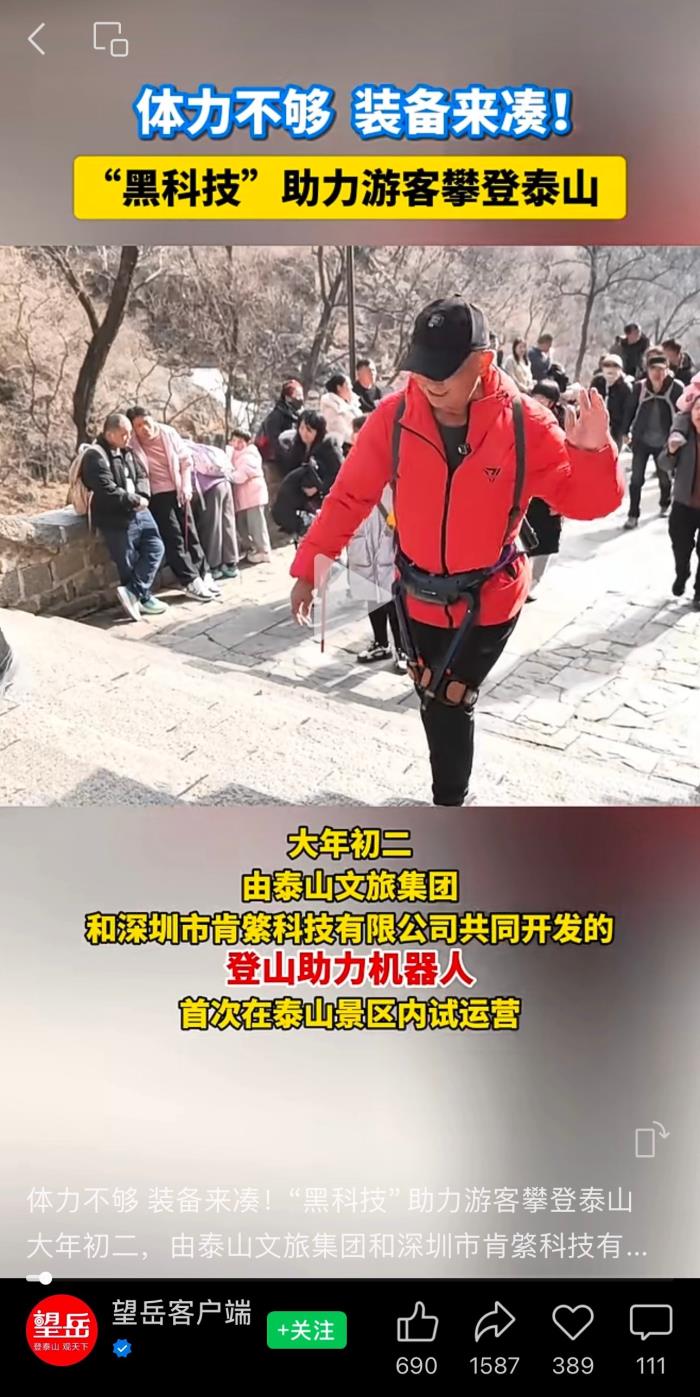
機器人扭著“小腰”翩翩起舞,還能嫻熟地轉手絹。在中央廣播電視總臺《2025年春節聯歡晚會》上,一群穿著花棉襖的機器人一出場就把晚會氣氛拉到最嗨。

這群炫酷“顯眼包”名為H1,年僅一歲半。此次春晚表演,H1團隊以獨特的“機械骨骼”形象示人,刻意營造與真人舞者的“反差萌”。它們自帶高精度3D激光SLAM自主定位和導航、多智能體協同規劃、先進組網方案以及全身AI運動控制等高科技,確保步伐穩健、動作整齊。其中,H1身藏“秘密武器”——AI驅動全身運動控制技術。憑借先進的AI算法,H1不僅能精準跟上音樂節奏,更能體悟舞蹈韻味,實時調整動作,跳出“智能舞蹈”。

澎湃新聞記者從上海大學方面了解到,H1背后的研發企業是四足機器人領域最知名的公司之一宇樹科技,其CEO為上海大學2016屆校友王興興。

早在上海大學讀研期間,王興興就著手小型化電動四足機器人的研制。技術的起點僅是較為模糊的概念設計,當時國內外對于該領域的研究還集中于液壓驅動式的技術方案,如何使用電驅動技術實現具有良好機動性的四足機器人方案并不十分明確。抱著對機器人的科研的強烈熱情和執著,多少個節假日王興興都堅守在實驗室,直到在國外公開文獻的基礎上獨立設計開發了他的第一款產品——XDog,成為全球首款外轉子無刷電機驅動的小型高性能低成本四足機器人。由于XDog的測試視頻被國內外媒體多方報道,2016年6月剛從上海大學畢業不久的王興興獲得天使輪融資,自此創立宇樹科技。公司發展至今,宇樹科技已經成為四足機器人領域最知名的公司之一,在四足機器人這個新興的品類里,宇樹科技成為最早實現商業化的四足機器人公司之一。
2024年7月,上海大學與寶山區、杭州宇樹科技簽訂戰略合作協議,共同成立“上海大學通用智能機器人研究院”。三方計劃在推動人形機器人產業的快速發展和轉型升級等方面展開合作,緊密圍繞“交叉-感知-芯片-本體”等機器人共性關鍵技術開展研究與產業化工作,共同建設通用智能機器人產業制高點。
2024年11月,上海大學機電工程與自動化學院和宇樹科技等聯合申報并獲批國家重點研發計劃智能機器人專項項目,共同致力于基于生成式人工智能驅動的機器人集群三維環境協同探索研究,充分利用人工智能、具身智能、多模態模型等先進技術,提升機器人集群協同作業的泛化性,實現野外復雜未知環境下多目標快速探索,期望在自然災害救援、環境監測、地質勘探等多領域服務國家戰略。
相關推薦

- 免責聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認可。 交易和投資涉及高風險,讀者在采取與本文內容相關的任何行動之前,請務必進行充分的盡職調查。最終的決策應該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產生的任何金錢損失負任何責任。
