

 新火種
2023-10-19
新火種
2023-10-19 


新算法可以讓機器人在人群中穿梭
10 月 13 日消息,機器人已經(jīng)廣泛應(yīng)用于外賣、快遞、機場引導(dǎo)、建筑工程檢查等多個領(lǐng)域,但存在的一個難點就是在人群中間移動。
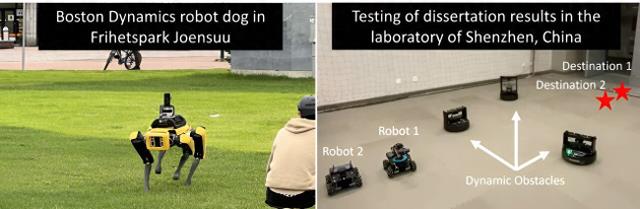
目前機器人主要依賴攝像頭和其它傳感器觀察周圍環(huán)境,但這種方案并不穩(wěn)定,而且周圍人群會動態(tài)調(diào)整方向,因此機器人很難在人群場景下應(yīng)用。
理學(xué)碩士 Chengmin Zhou 在最新論文中,提出了強化學(xué)習(xí)算法(RL)引導(dǎo)機器人在人群中移動。
這是一種無模型強化學(xué)習(xí)算法,它使機器人能夠從歷史經(jīng)驗中學(xué)習(xí),經(jīng)過訓(xùn)練或?qū)W習(xí),機器人即使在充滿挑戰(zhàn)的情況下也能穿行。
注:這種方式也存在諸多挑戰(zhàn),例如學(xué)習(xí)效果慢,無法高效分析傳感器信息,導(dǎo)致無法有效應(yīng)對復(fù)雜人群場景等。
相關(guān)推薦




- 免責(zé)聲明
- 本文所包含的觀點僅代表作者個人看法,不代表新火種的觀點。在新火種上獲取的所有信息均不應(yīng)被視為投資建議。新火種對本文可能提及或鏈接的任何項目不表示認(rèn)可。 交易和投資涉及高風(fēng)險,讀者在采取與本文內(nèi)容相關(guān)的任何行動之前,請務(wù)必進行充分的盡職調(diào)查。最終的決策應(yīng)該基于您自己的獨立判斷。新火種不對因依賴本文觀點而產(chǎn)生的任何金錢損失負(fù)任何責(zé)任。
